










Park Assist Pilot front, rear and along the sides
Forwards
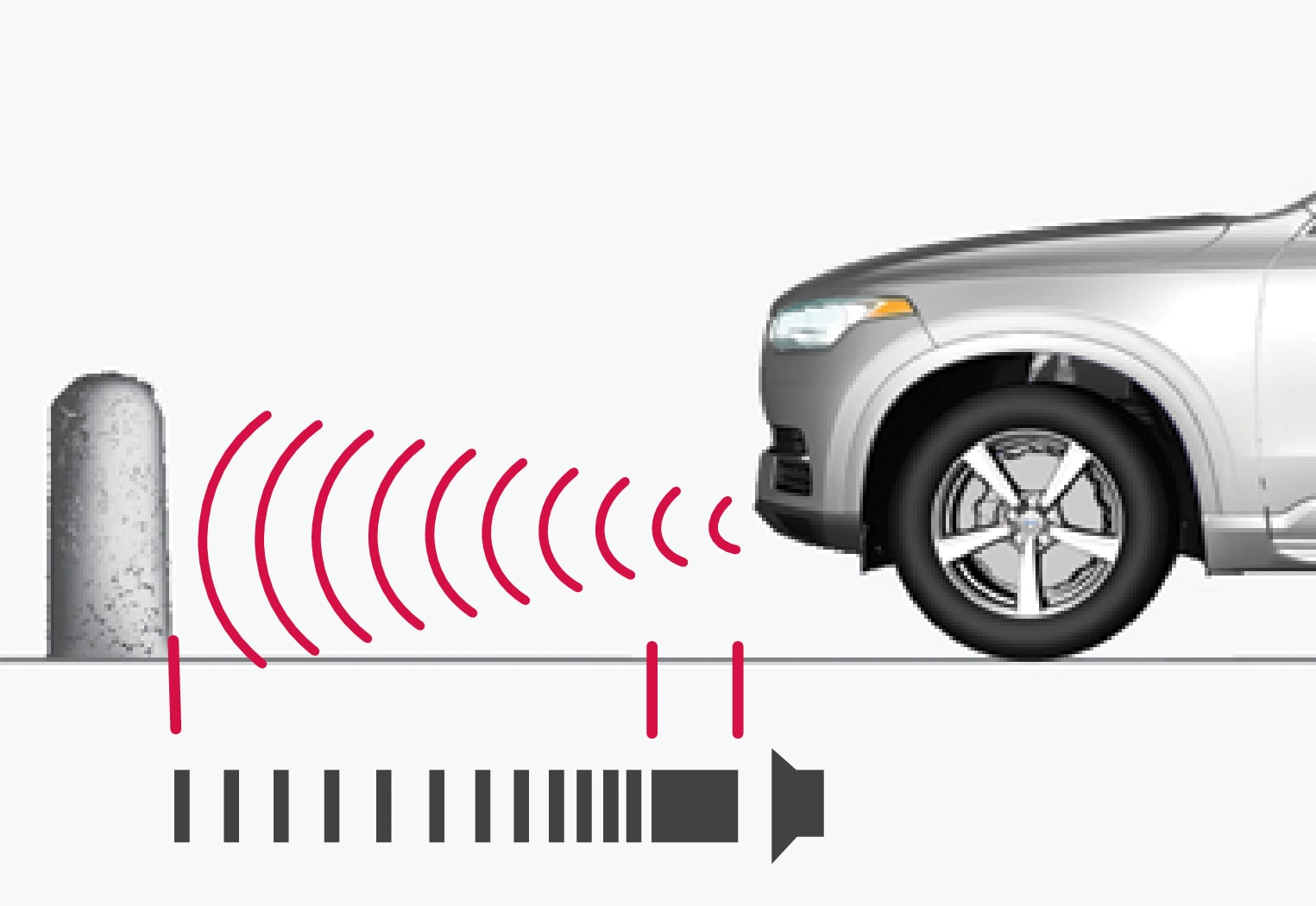
The front parking assistance sensors are activated automatically when the engine is started. They are active at speeds below 10 km/h (6 mph).
The measuring range is approx. 80 cm (2.5 ft) in front of the car.
Note
Important
Backwards
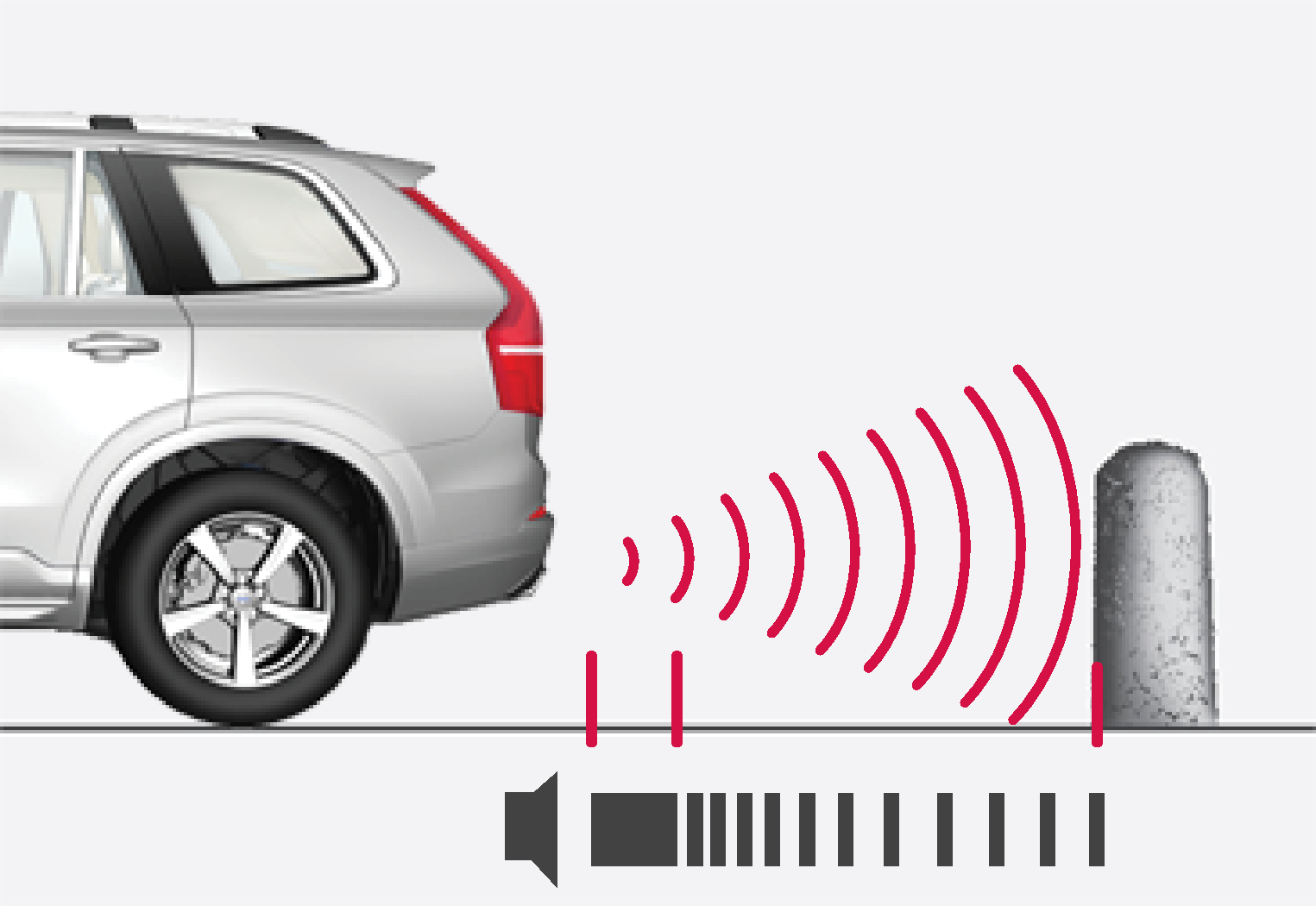
The sensors for reverse are activated if the car rolls backward without a gear engaged or when the gear lever is moved to reverse position.
The measuring range is approx. 1.5 metres (5 ft) behind the car.
When reversing with a trailer connected to the car's electrical system, parking assistance backward is deactivated automatically.
Note
Along the sides
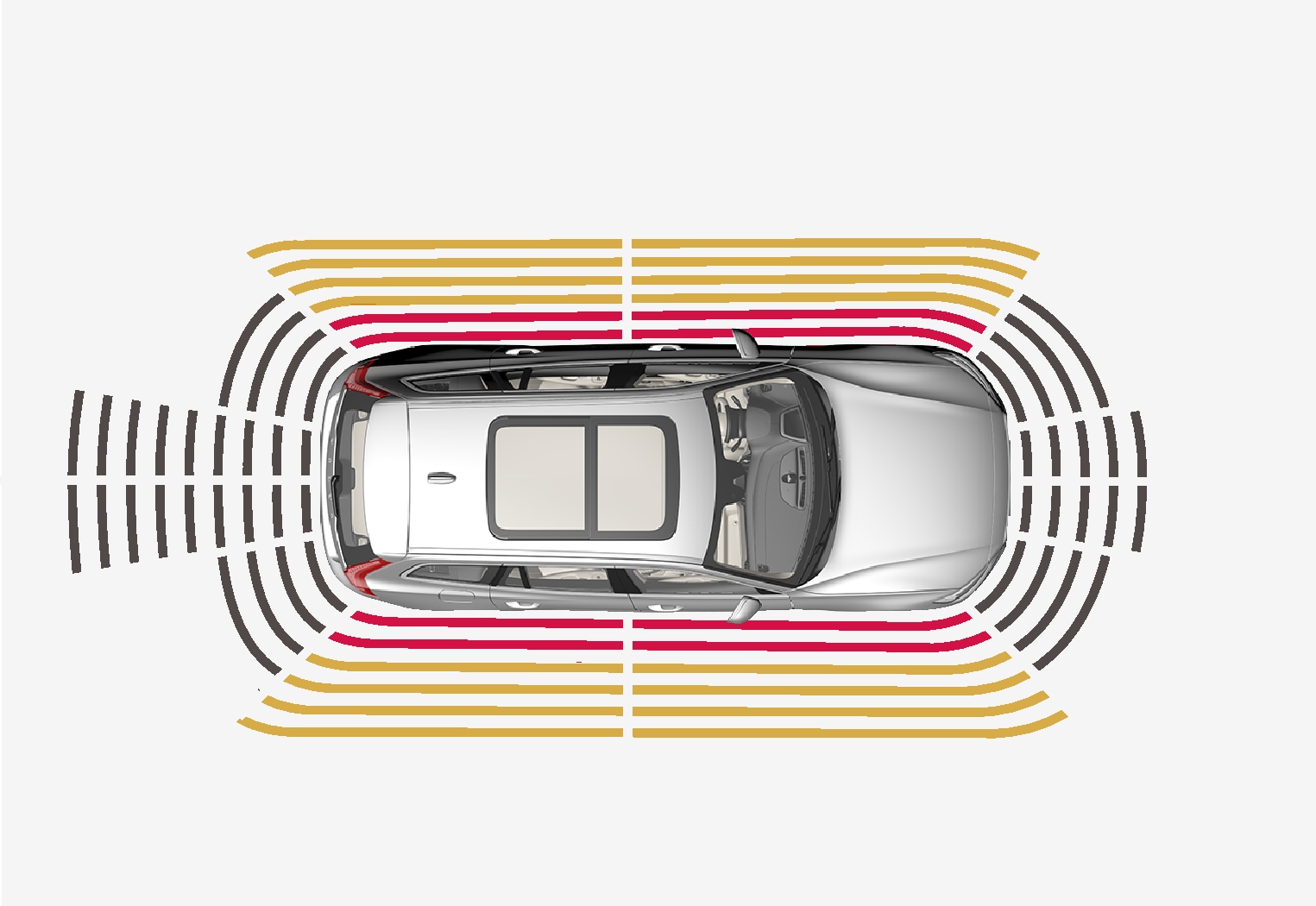
Parking assistance side sensors are activated automatically when the engine is started. They are active at speeds below 10 km/h (6 mph).
The measuring range is approx. 25 cm (0.8 ft) from the sides.
However, the detection area of the side sensors increases significantly when the steering angle of the front wheels is increased, and when the steering wheel is turned, obstacles up to approx. 90 cm (3 ft) diagonally behind or in front of the car can be detected (see also the section "Sensor field to the sides" in the section entitled "Sensor fields from Park Assist Pilot for parking camera").