













用适应性巡航控制系统更改目标
与自动变速箱配合使用,适应性巡航控制 (ACC1) 具有在某些速度下更换目标的功能。
目标更换
当适应性巡航控制以低于30公里/小时(20英里/小时)的车速跟随另一辆汽车,且目标从移动车辆更换为静止车辆时,适应性巡航控制系统将根据静止车辆减慢车速。
警告
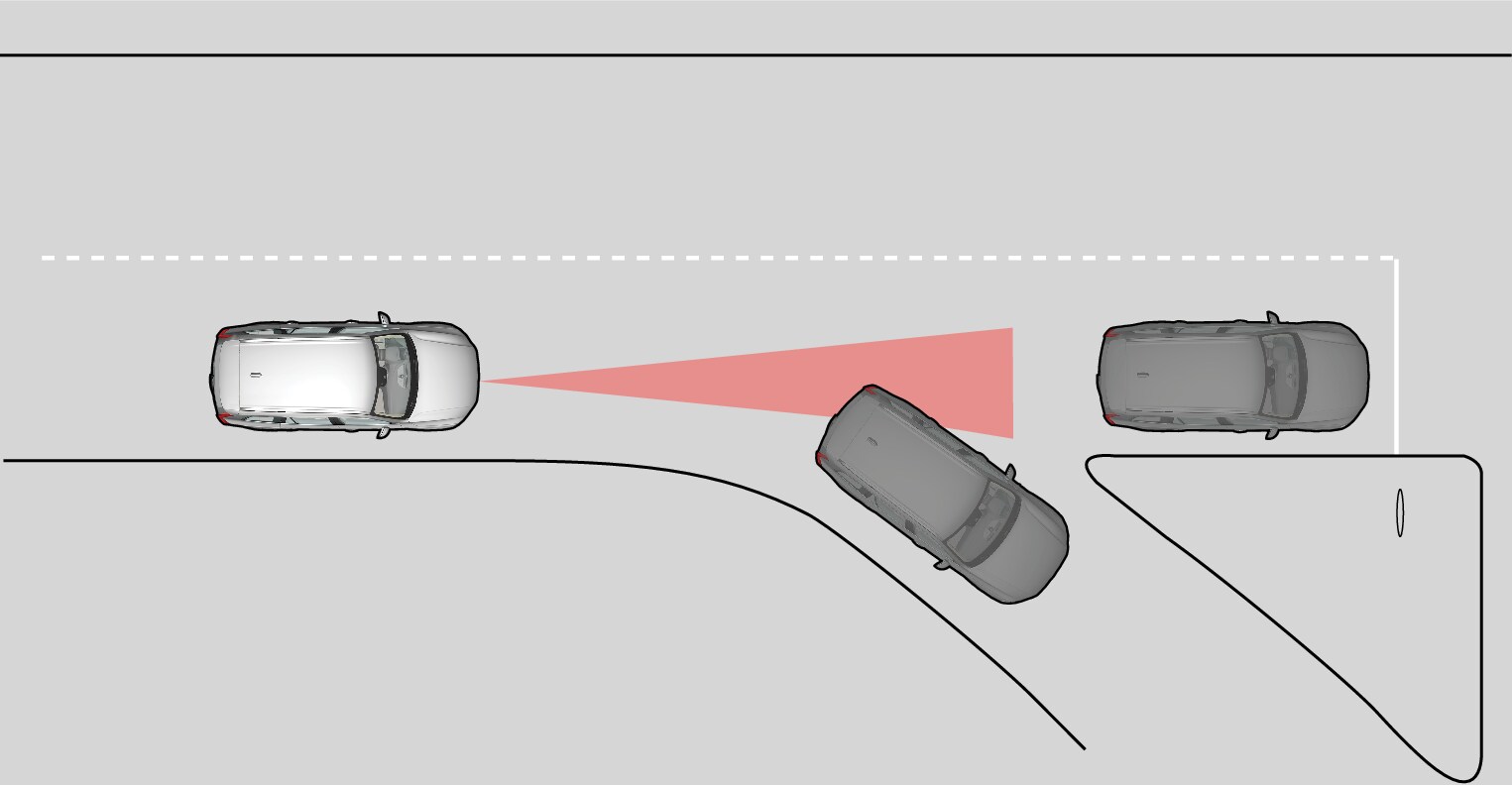
当自适应巡航控制系统以超过约30公里/小时(20英里/小时)的车速跟随另一辆车,目标从一辆移动的车辆变成一辆静止的车辆,自适应巡航控制系统会忽略静止车辆,选择加速至存储的车速。
- 此时,驾驶员必须主动做出干预操作并且制动。
当目标更换时,自动等待模式
适应性巡航控制系统解除并设置为待机模式:
- 当车速低于5 公里/小时(3英里/小时)且适应性巡航控制系统不确定目标物体是静止车辆还是其他物体,例如缓冲路拱。
- 当车速低于5公里/小时(3英里/小时)且前方的车辆转弯,使适应性巡航控制系统不再跟随汽车时。