













自适应巡航控制*
自适应巡航控制(ACC1)可帮助驾驶员与前方的车辆保持相同的车速并保持预先选择的时间间隔。
在畅通的高速公路和长直干道上的长途行驶中,自适应巡航控制系统能够为您带来更为轻松惬意的驾驶体验。
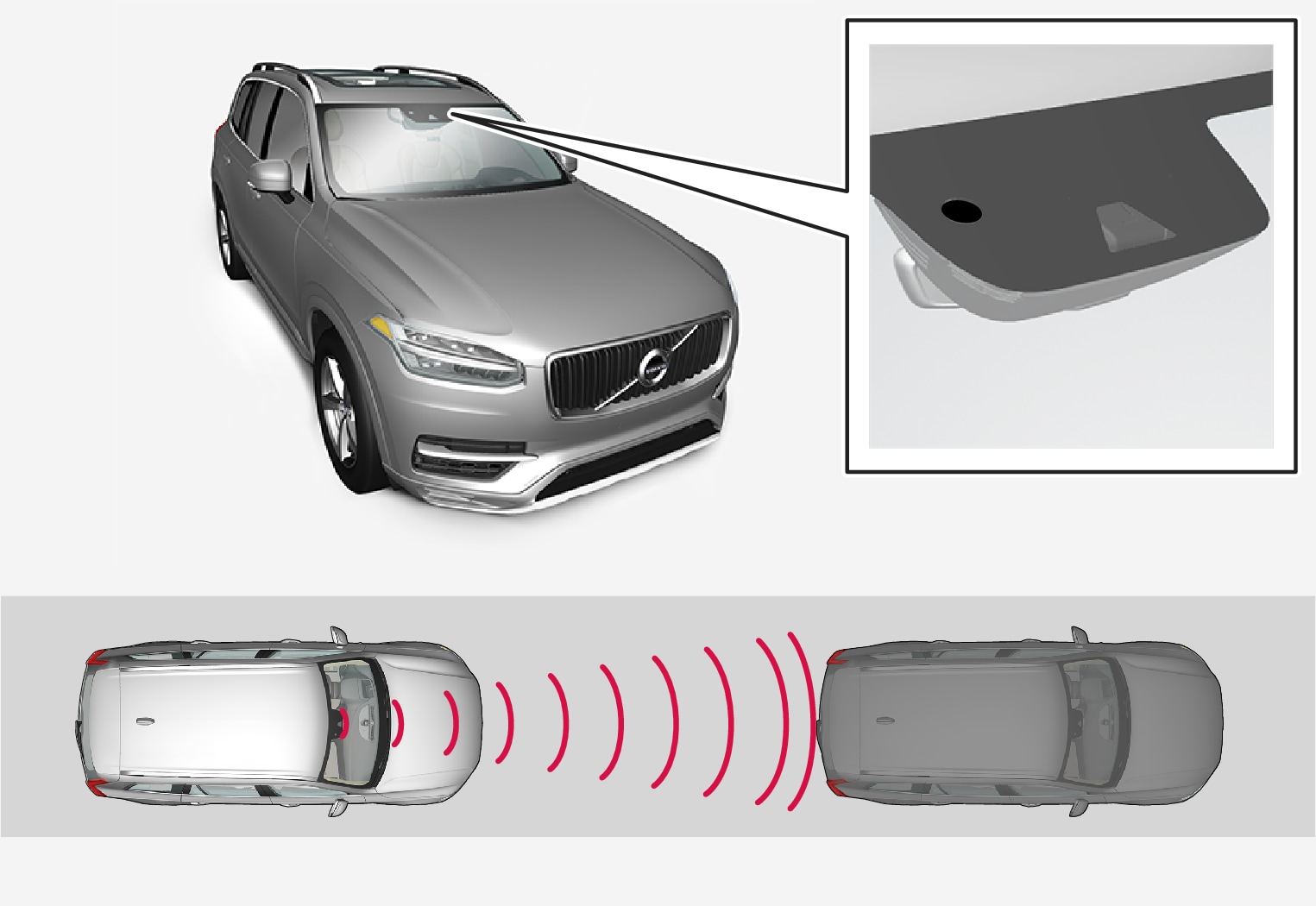
驾驶员选择所需速度和与前方车辆的时间间隔。如果摄像头和雷达单元探测到车辆前方有较慢车辆,车速将通过预先设定的与前方车辆的时间间隔自动调整。当前方道路再次畅通,汽车恢复至选择的车速。
警告
- 自适应巡航控制是一项驾驶员辅助支持功能,旨在提升车辆的驾驶便捷性和安全性 - 它无法应对所有交通、天气与道路条件下的各种状况。
- 建议驾驶员阅读《车主手册》中与此功能有关的所有章节,从而了解诸如功能限制等因素,并了解使用此系统前应掌握的所有知识(参见本文结尾处的链接列表)。
- 自适应巡航控制不能替代驾驶员的注意力与判断。驾驶员始终负责确保车辆以适当车速安全行驶,与其他车辆保持适当距离,并且符合现行的交通法律和法规。
注意
此功能可作为标配件或选装件提供,视市场而定。
自适应巡航控制利用加速和制动功能调节车速。利用制动调节车速时,制动器发出低工作音为正常现象。
自适应巡航控制目的在于以平稳方式控制速度。在需要紧急制动的情况下,驾驶员必须自己制动。这适用于车速差较大的情况,或者如果前方车辆急刹车。由于雷达单元的限制,可能出现意外制动或完全不制动。
自适应巡航控制目的在于以驾驶员设置的时间间隔,在同一条车道上跟住前方的汽车。如果雷达单元无法看到前方的任何车辆,则将维持驾驶员设置和存储的车速。如果前方车辆的车速增大并超过存储的车速,也会发生上述情况。
以下情况适用于配备自动变速箱的车型:
- 自适应巡航控制能够以从静止直至200公里/小时(125英里/小时)的车速跟随另一部车辆。
以下情况适用于配备手动变速箱的车型:
- 自适应巡航控制系统能够以从30公里/小时(20英里/小时)直至200公里/小时(125英里/小时)的车速跟随另一部车辆。
警告
- 自适应巡航控制系并非防撞系统。驾驶员始终负有责任并且必须在系统未探测到前车时执行干预。
- 对人或动物,以及小型车辆,例如自行车和摩托车,自适应巡航控制系统不会采取制动措施。还包括低架拖车以及接近的、缓慢移动或静止的车辆和物体。
- 在诸如城市交通、交叉口、道路有大量积水或烂泥的湿滑路面、大雨/雪天气、能见度差、道路蜿蜒曲折或高速公路连接路等严苛条件下,不得使用自适应巡航控制系统。
重要信息
维修保养自适应巡航控制系统元件的工作只可由沃尔沃授权维修中心执行。
概览
控制器
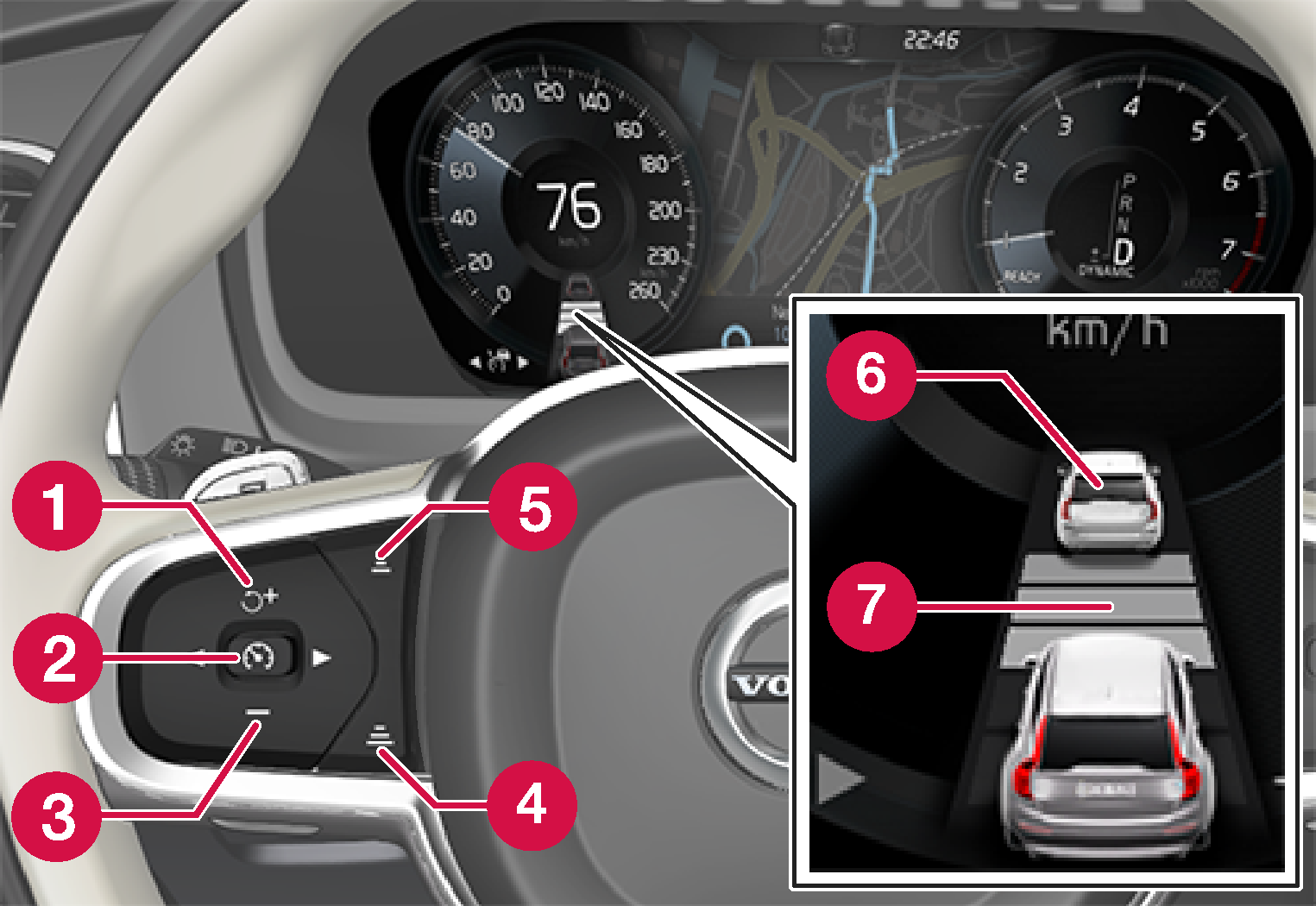
 |  :从待机模式启用自适应巡航控制并恢复存储的车速 :从待机模式启用自适应巡航控制并恢复存储的车速 |
|  :增加存储的车速 :增加存储的车速 |
 |  :从待机模式 - 启用自适应巡航控制并存储当前车速 :从待机模式 - 启用自适应巡航控制并存储当前车速 |
| :从启用模式 - 将自适应巡航控制停用/更改为待机模式 |
 |  :降低存储的车速 :降低存储的车速 |
 | 增大与前车的时间间隔 |
 | 缩短与前车的时间间隔 |
 | 目标车辆指示器:ACC已探测到目标车辆并以预先设置的时间间隔跟随目标车辆 |
 | 与前车时间间隔的符号 |
注意
如果车辆配备自适应巡航控制*,则可在定速巡航与自适应巡航控制之间切换 - 请参阅标题“在CC与ACC之间切换”下的内容。
驾驶员显示屏
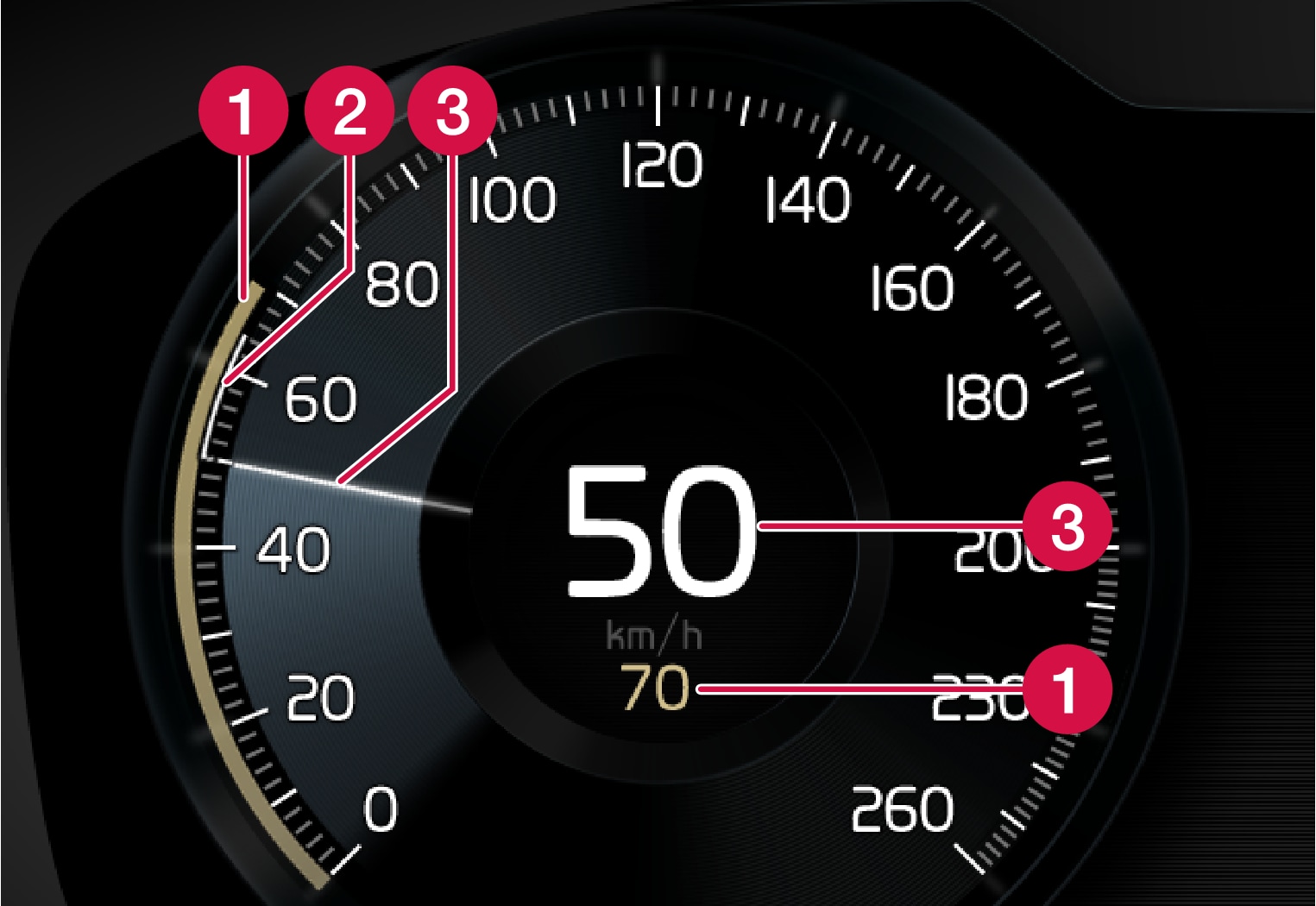
- 已存储车速
- 前方车辆的车速。
- 您的当前车速。
要查看基于交通状况的不同符号组合,请参阅标题“自适应巡航控制的符号和消息”部分。