ノート
PAP機能により、スペースの計測が行われ、ステアリングホイールが操作されます。運転者はコンバインド・メーター・パネルの指示に従ってギヤを選択(前進/後進)し、速度とブレーキを制御するだけで済みます。
エンジンが始動し、以下の条件が満たされると、PAPが起動します。
- PAP 機能の作動中に ABS1 または ESC2 機能が介入してはならない。これらの機能は急勾配や滑りやすい路面などで起動することがあります。詳しくは、フットブレーキおよびスタビリティ・コントロール・システムESCのセクションを参照してください。
- トレーラーが車両に接続されていない。
- 車速が50 km/h未満である。
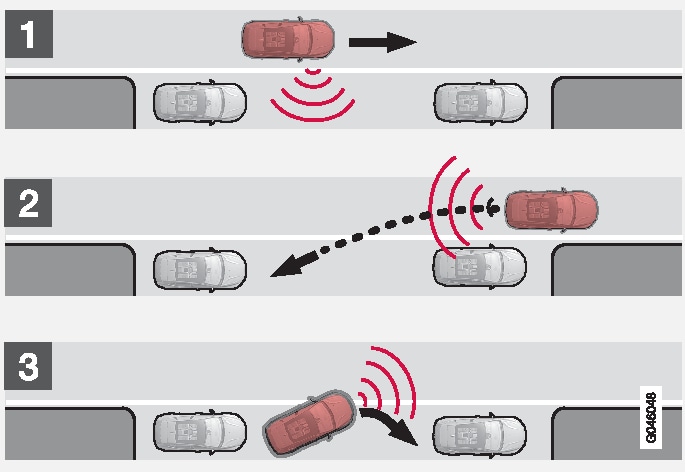
PAP 機能は以下の手順で駐車を行います。