ノート
PAP機能はスペースの寸法を測り、車両を操舵します。運転者の役割は以下の通りです。
- 車両周辺に目を配ります
- センターディスプレイのインストラクションに従います
- ギヤシフトを行います(後退/前進)
- 安全速度の制御、維持を行います
- ブレーキを操作し、停止します
エンジンが始動し、以下の条件が満たされると、PAPが起動します。
- 車両にトレーラーが連結されていない。
- 速度が30 km/h (20 mph)未満であること。
ノート
PAP が駐車スペースを探しているときは、車両から駐車スペースまでの距離が0.5~1.5 mである必要があります。
パーキング
PAP 機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 後退中に、車両は駐車スペースに入るように操舵されます。
- 車両がスペースに入ります。その後システムが運転者にギヤの変更を要求する場合があります。
駐車スペースの探索と測定

この機能はセンターディスプレイの機能ビューで作動することができます。
カメラビューからアクセスすることも可能です。
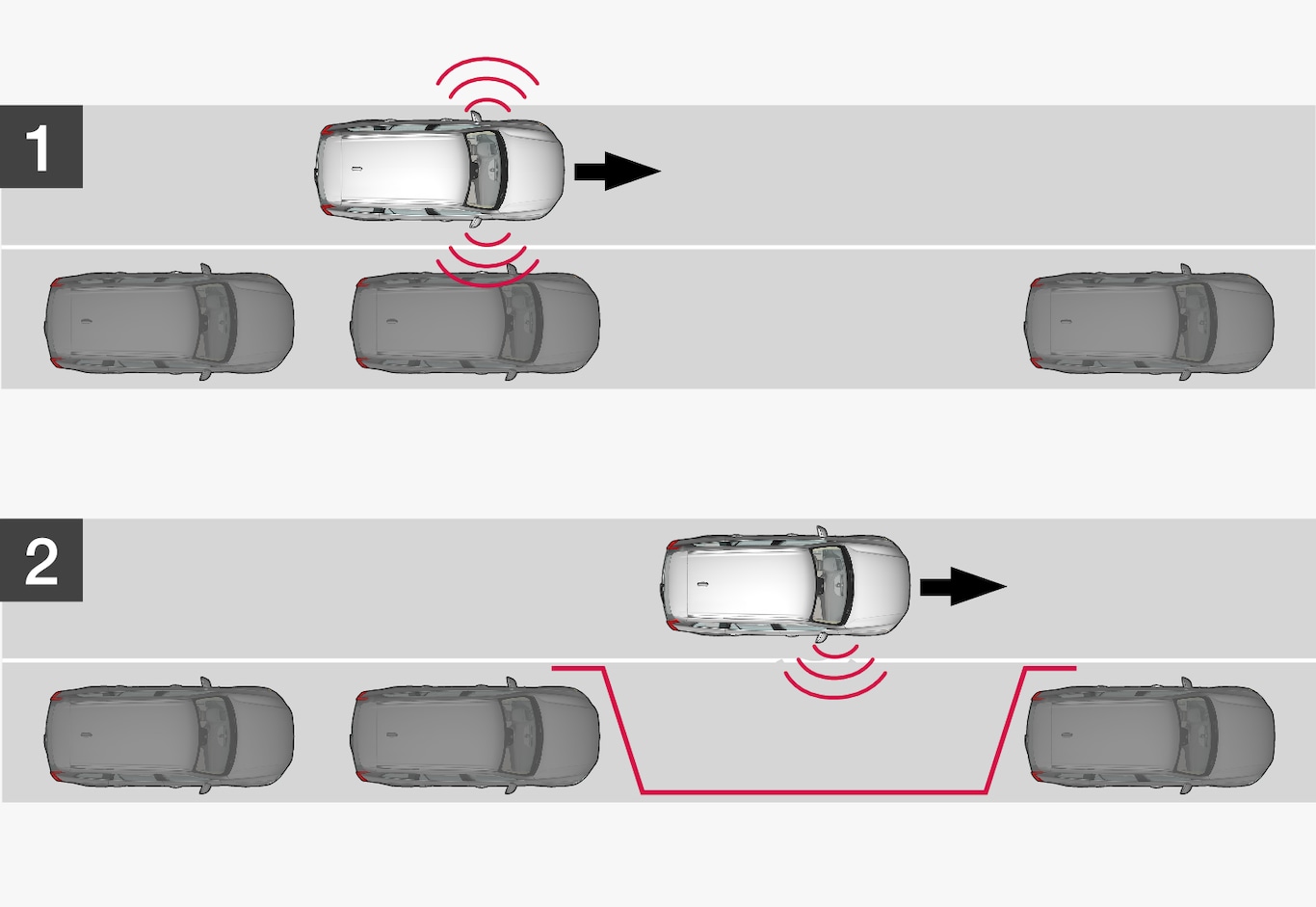
縦列駐車の場合は30 km/h (20 mph)以下、並列駐車の場合は20 km/h (12 mph)以下で走行します。
機能ビューで 自動駐車 をタップします。
PAP が駐車スペースを探し、十分なスペースがあるか確認します。
センターディスプレイを注視し、適切な駐車スペースが見つかったことを示すグラフィックおよびメッセージが表示されたときに、すぐに停車できるように備えておきます。
ポップアップウィンドウが表示されます。
縦列駐車 または 並列駐車 を選択し、リバースギヤを選択します。
ノート
PAP は車両の助手席側にある駐車スペースを探し、指示を表示して、車両を案内します。しかし、必要であれば、運転席側の路上に駐車させることもできます。
- 運転席側の方向指示器を作動させてください。システムは運転席側の駐車スペースを探します。
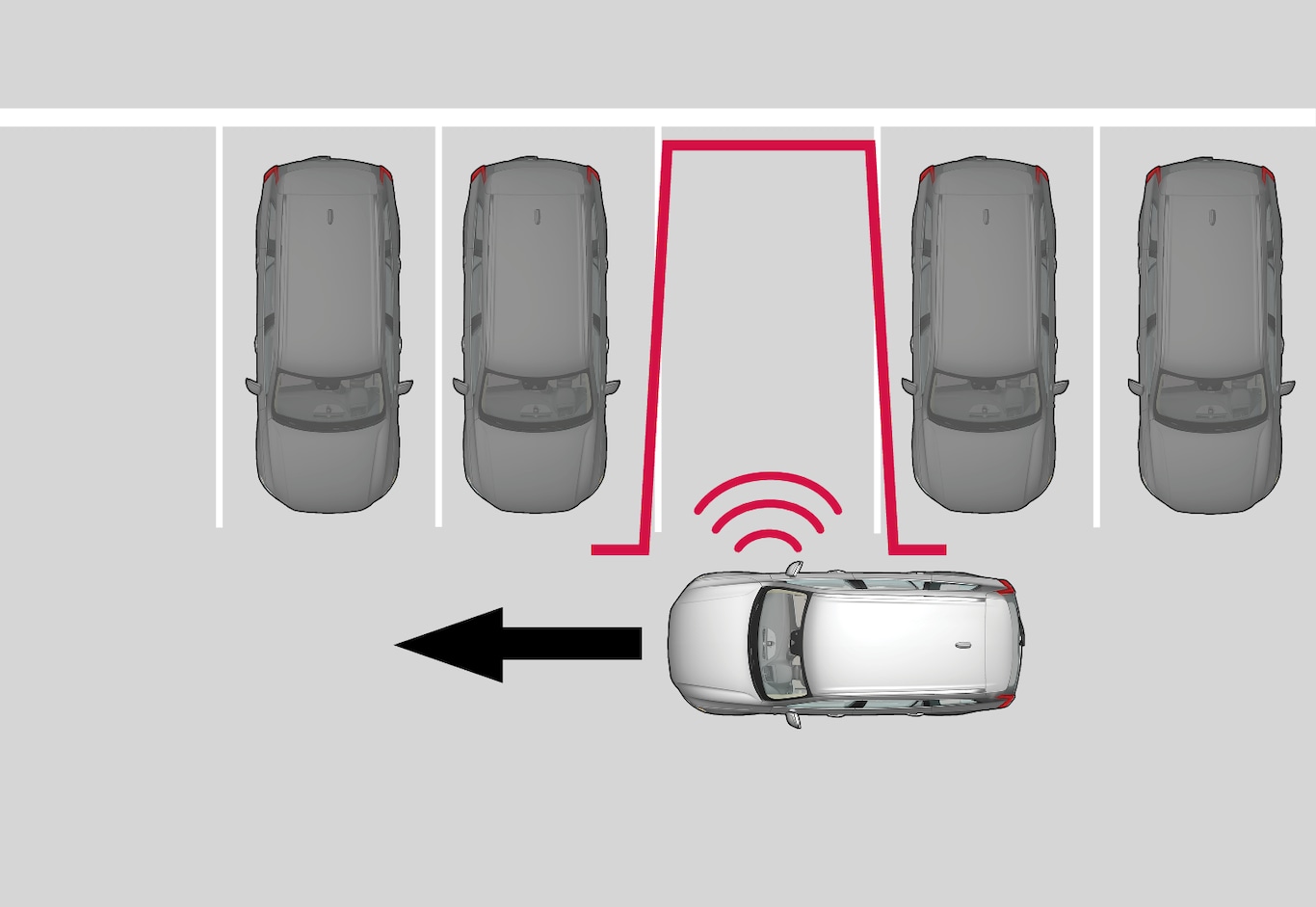
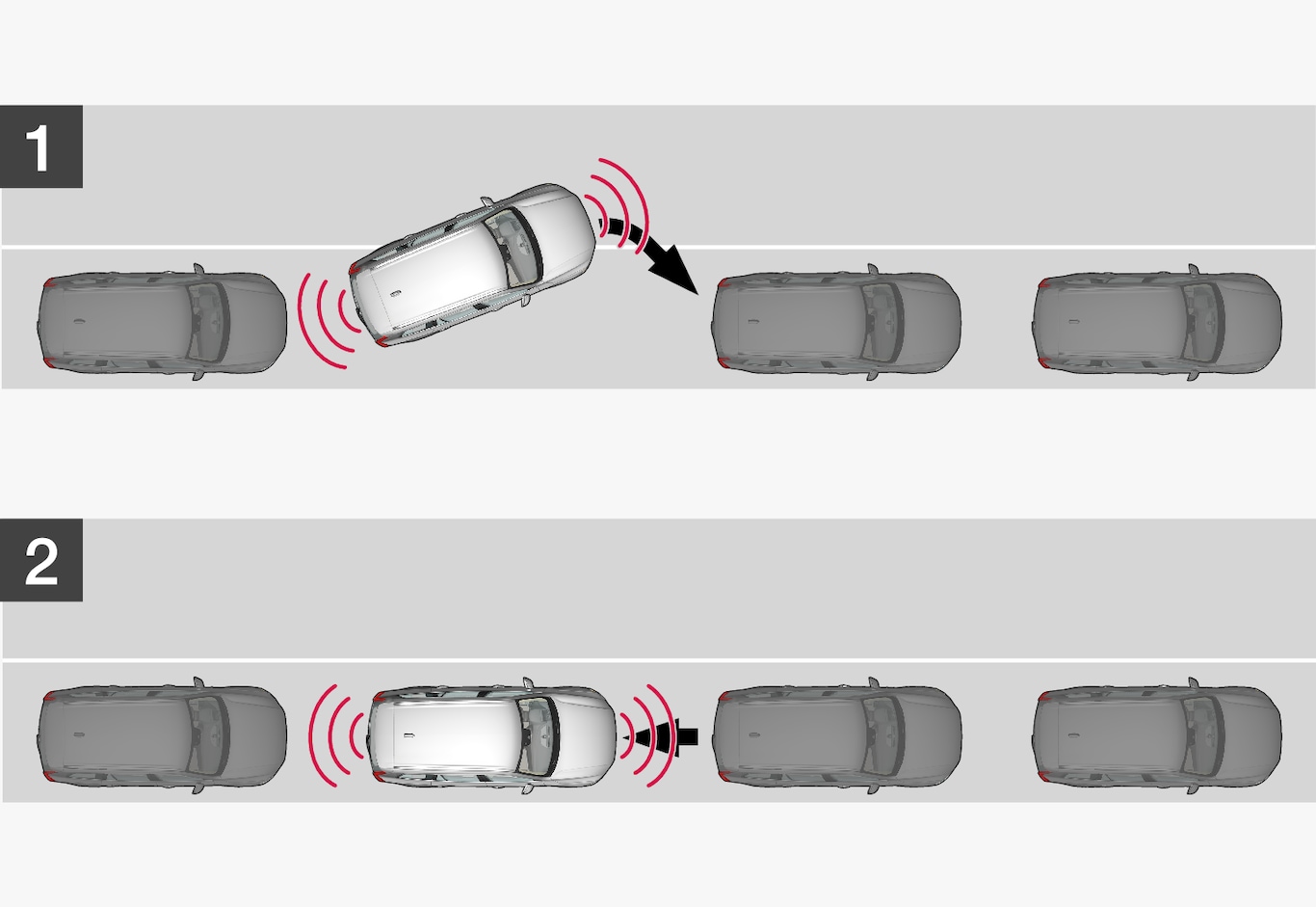
駐車スペースへ後退して入れる
後方に障害物がないことを確認します。
ステアリングホイールを握らずゆっくり、慎重に後退します。車速は 7 km/h (4 mph)以内に保ってください。
PAP が車両を操舵して駐車スペースに誘導します。
センターディスプレイを注視し、画像およびメッセージで停車を指示されたときにすぐに停車できるようにしておきます。
ノート
- PAP機能が作動している間は、ステアリングホイールに手を触れないようにしてください。
- ステアリングホイールの動きが一切妨げられず、自由に回転できるようにしてください。
- 最適な結果を得るためには、ステアリングホイールが回転し終わるのを待ってから、前進/後進を始めてください。
車両を駐車スペースに入れる

ギヤセレクターレバーをD位置に入れ、ステアリングホイールが回り終わるまで待って、ゆっくりと前進させます。
センターディスプレイを注視し、画像およびメッセージで停車を指示されたときにすぐに停車できるようにしておきます。
リバースギヤを選択して、ゆっくりと後退させます。
センターディスプレイを注視し、画像およびメッセージで停車を指示されたときにすぐに停車できるようにしておきます。
機能が自動的にオフになり、画像とメッセージにより、駐車が完了したことが表示されます。運転者が車両の位置を修正することが必要になる場合があります。車両が正しく駐車されているか判断できるのは、運転者のみです。
重要
パークアシストがセンサーを使用するときと比べ、PAPがセンサーを使用するときには、警告距離が短くなります。
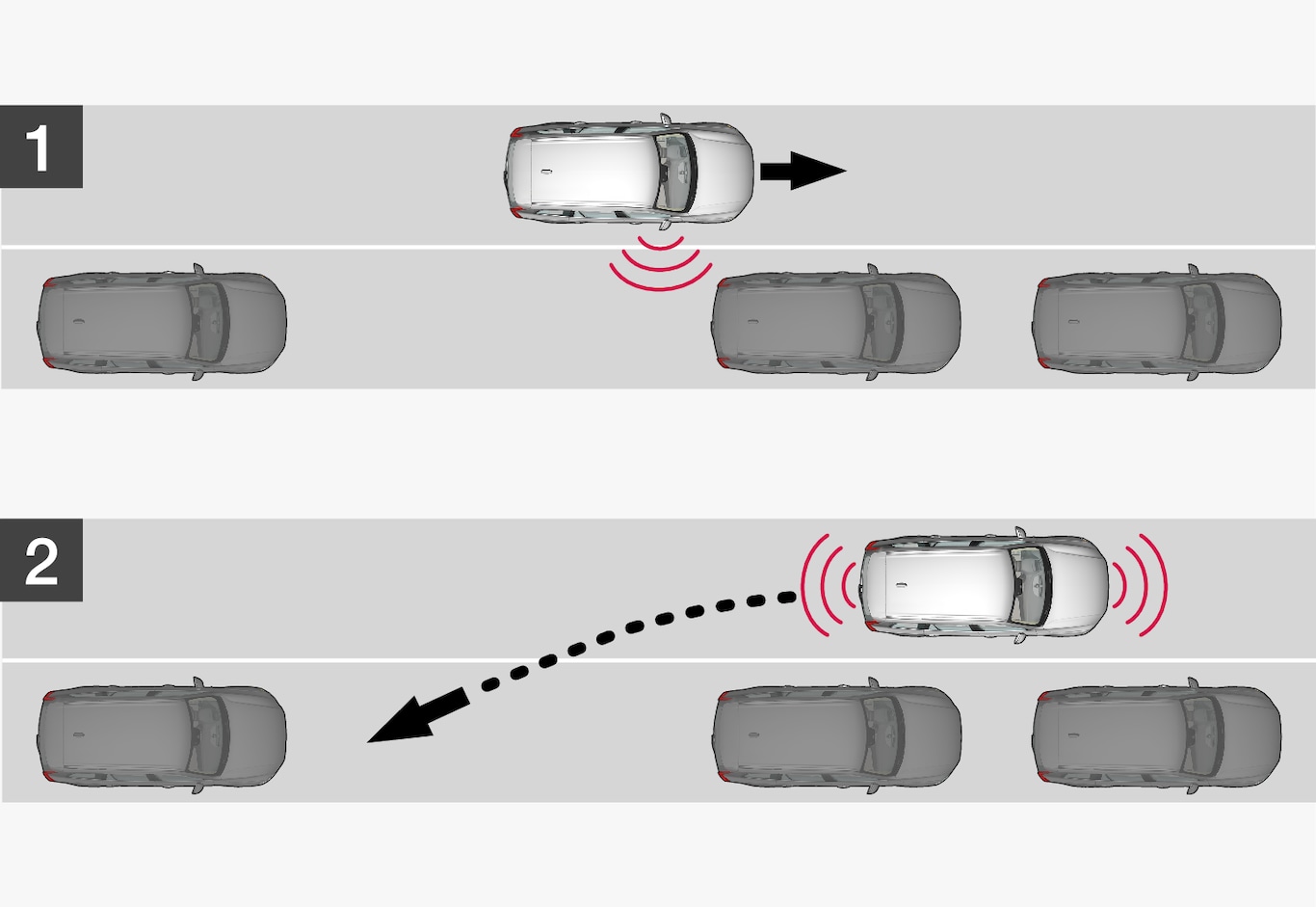
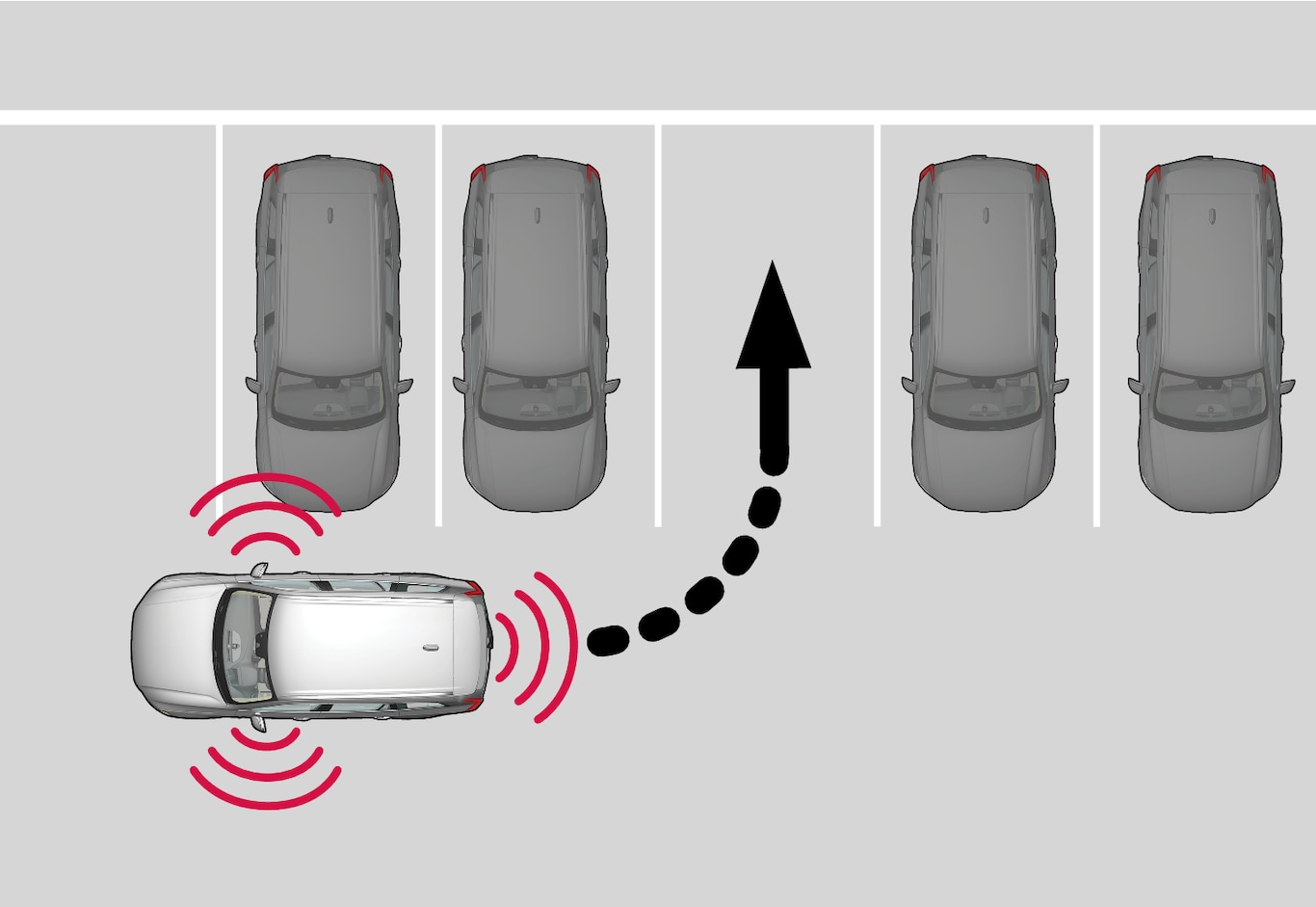
駐車スペースから出る
ノート
駐車スペースから出る場合、自動発車 機能の使用は縦列駐車に限定する必要があります。並列駐車された車両には使用できません。

自動発車 機能はセンターディスプレイの機能ビューで作動させます。
機能ビューで 自動発車 をタップします。
方向指示器を使用して、車両が駐車スペースから出る方向を選択します。
センターディスプレイを注視し、駐車時と同様に指示に従います。
機能の動作が完了すると、ステアリングホイールが一気に戻ることがあります。この場合、運転者は駐車スペースから出られるようにステアリングホイールを最大舵取り角度まで回すことが必要になる可能性があります。
運転者がまだ車両が駐車スペースにあると考える場合でも、PAP がさらなるステアリング操作なしで運転者が車両を駐車スペースから出せると判定した時点で、この機能は停止します。