PAP は最初にスペースの広さが十分であるかを確認してから、運転者の車庫入れ操作を支援します。
センターディスプレイには、シンボル、グラフィックおよびメッセージでさまざまな操作指示とそのタイミングが表示されます。
ノート
PAP機能はスペースの寸法を測り、車両を操舵します。運転者の役割は以下の通りです。
- 車両周辺に目を配ります
- センターディスプレイのインストラクションに従います
- ギヤシフトを行います(後退/前進)
- 安全速度の制御、維持を行います
- ブレーキを操作し、停止します
注意
PAP はあらゆる状況で作動するわけではなく、補助機能に過ぎません。
車両を安全に運転し、駐車中、周囲の状況や接近または通過する他の道路使用者に注意をはらう最終責任はつねに運転者にあります。
駐車状況の種類
PAP は以下のようなさまざまな駐車状況で使用することができます。
縦列駐車
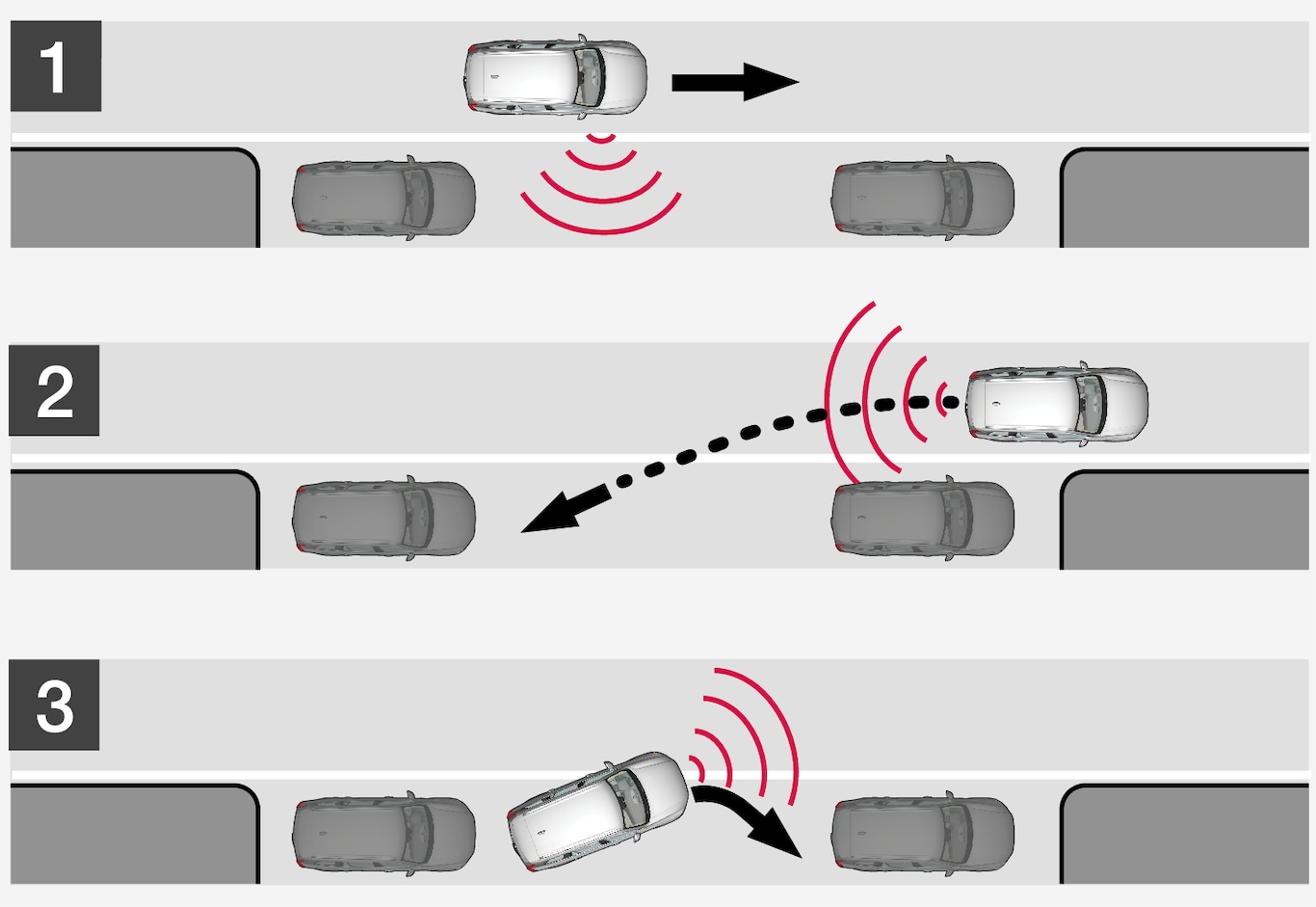
PAP 機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 後退中に、車両は駐車スペースに入るように操舵されます。
- 車両を前進/後退させて、車両を駐車スペースに入れます。
自動発車 機能を使用することにより、並列駐車された車両は PAP による支援を利用して駐車スペースから出ることもできます。「アクティブパークアシストによる駐車」の「駐車スペースから出る」を参照してください。
並列駐車
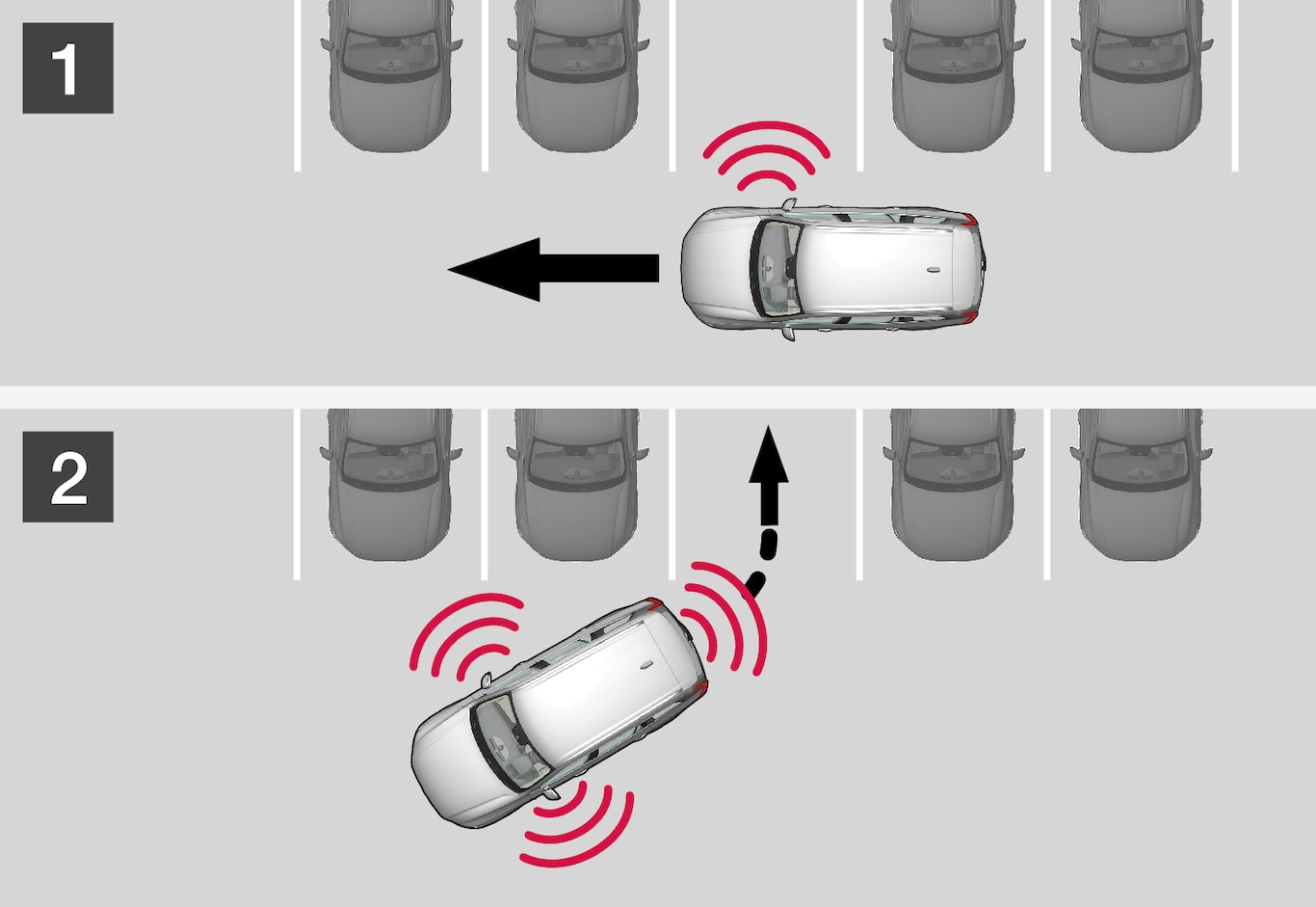
PAP 機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 車両を駐車スペースへ後退させます。その後車両を前進/後退させて、車両を駐車スペースに入れます。
ノート
並列駐車された車両に PAP 自動発車 機能を使用することはできません。本機能は縦列駐車された車両にのみ使用する必要があります。