适应性巡航控制系统* - 功能
适应性巡航控制(ACC – Adaptive Cruise Control)帮助驾驶员与前方的车辆保持相同的车速和预先选择的时间间隔。
适应性巡航控制由定速巡航控制系统与协调的距离保持系统组成。
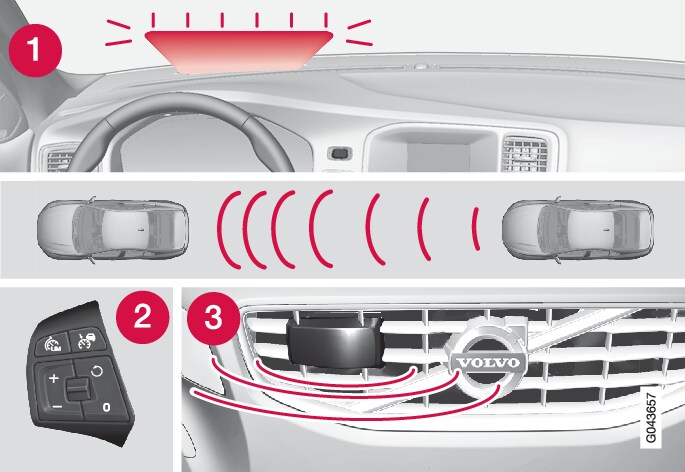
功能概览



警告
自适应巡航控制系统不是一种防撞系统。如果系统未侦测到前方车辆则驾驶员必须介入。
对人或动物,以及小型车辆,例如自行车和摩托车,自适应巡航控制系统不会采取制动措施。还包括低架拖车以及接近的、缓慢移动或静止的车辆和物体。
在诸如城市交通、密集交通、交叉口、打滑表面、带许多积水或烂泥的道路上、大雨/雪天气、能见度较差时、曲折蜿蜒的道路上或高速公路进出口,不要使用自适应巡航控制系统。
与前方车辆距离主要通过雷达传感器。巡航控制功能利用加速和制动功能调节车速。当适应性巡航控制系统使用制动器时,制动器发出低噪音是正常的。
警告
适应性巡航控制系统目的在于根据驾驶员设置的时间间隔,在同一条车道上跟住前方的汽车。如果雷达传感器控制系统无法看到前方的任何车辆,则将维持驾驶员设置和存储的车速。如果前方车辆的车速超过存储的车速,也会发生上述情况。
适应性巡航控制目的在于以平稳方式控制速度。在需要紧急制动的情况下,驾驶员必须自己制动。这牵涉到速度的大幅差异,或者如果前方车辆猛踩制动。由于 雷达传感器的限制,制动可能无预期发生或完全不发生。
适应性巡航控制系统启动,跟随另一辆车速在 30 公里/小时2 (20 英里/小时)至200 公里/小时(125 英里/小时)的车辆。如果车速降至30 公里/小时(20 英里/小时) 以下或发动机转速变得过低,则巡航控制系统设置为待机模式,终止自动制动 - 驾驶员则必须接管操控,与前车保持安全距离。
警示灯,需要驾驶员制动
适应性巡航控制有制动能力,相当于大约40%的汽车制动能力。
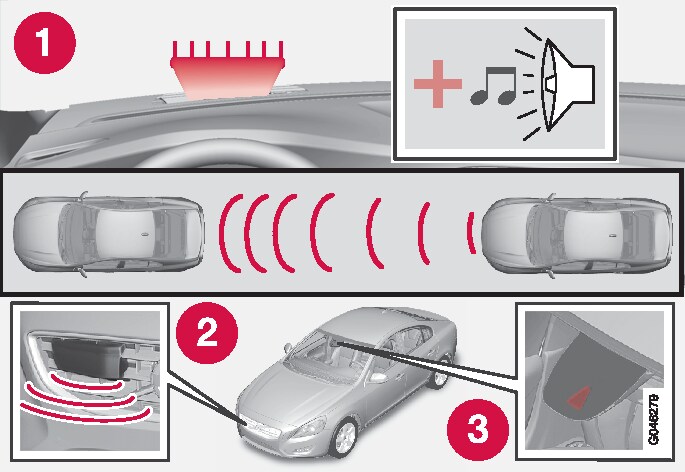
如果汽车需要以比适应性巡航控制制动能力更大的力进行制动而驾驶员未制动,则会利用碰撞警告系统警示灯与警示音,提醒驾驶员立即采取必要措施。
注意
警告
陡峭的路面和/或重物
始终牢记,适应性巡航控制主要是在平坦路面上行驶时使用。当在陡峭的下坡道路上重负或带拖车行驶时,可能很难与前面的车辆保持正确的距离 - 在这些情况下,要特别小心,并随时准备降低车速。