
















パークアシスト・パイロット*
アクティブパークアシスト・パイロット(PAP1)は、運転者が駐車スペースから出し入れするときに役立ちます。
PAP は最初にスペースの広さが十分であるかを確認してから、運転者のアシスト機能操作を支援します。
センターディスプレイには、シンボル、グラフィックおよびメッセージでさまざまな操作指示とそのタイミングが表示されます。
注意
- PAP 機能は、運転を手助けし、安全性を向上させるための補助的な運転者サポートであり、交通条件、気象条件および道路条件によっては対応できない状況があります。
- 車両のそばに人間やペットなどがいる場合がありますので、特にご注意ください。
- PAP は運転者の注意および判断に代わるものではありません。現行の交通規則および規制に従い、他の車両と適切な距離をとって、適切な速度で安全に車両を運転することは、つねに運転者の責任です。
ノート
PAP機能はスペースの寸法を測り、車両を操舵します。運転者の役割は以下の通りです。
- 車両周辺に目を配ります
- センターディスプレイのインストラクションに従います
- ギヤ(リバース/前進)を選択します。運転者がギヤチェンジを行う必要があるときには、「ピーン」という音がします
- 安全速度の制御、維持を行います
- ブレーキを操作し、停止します
駐車状況の種類
PAP は以下のようなさまざまな駐車状況で使用することができます。
縦列駐車
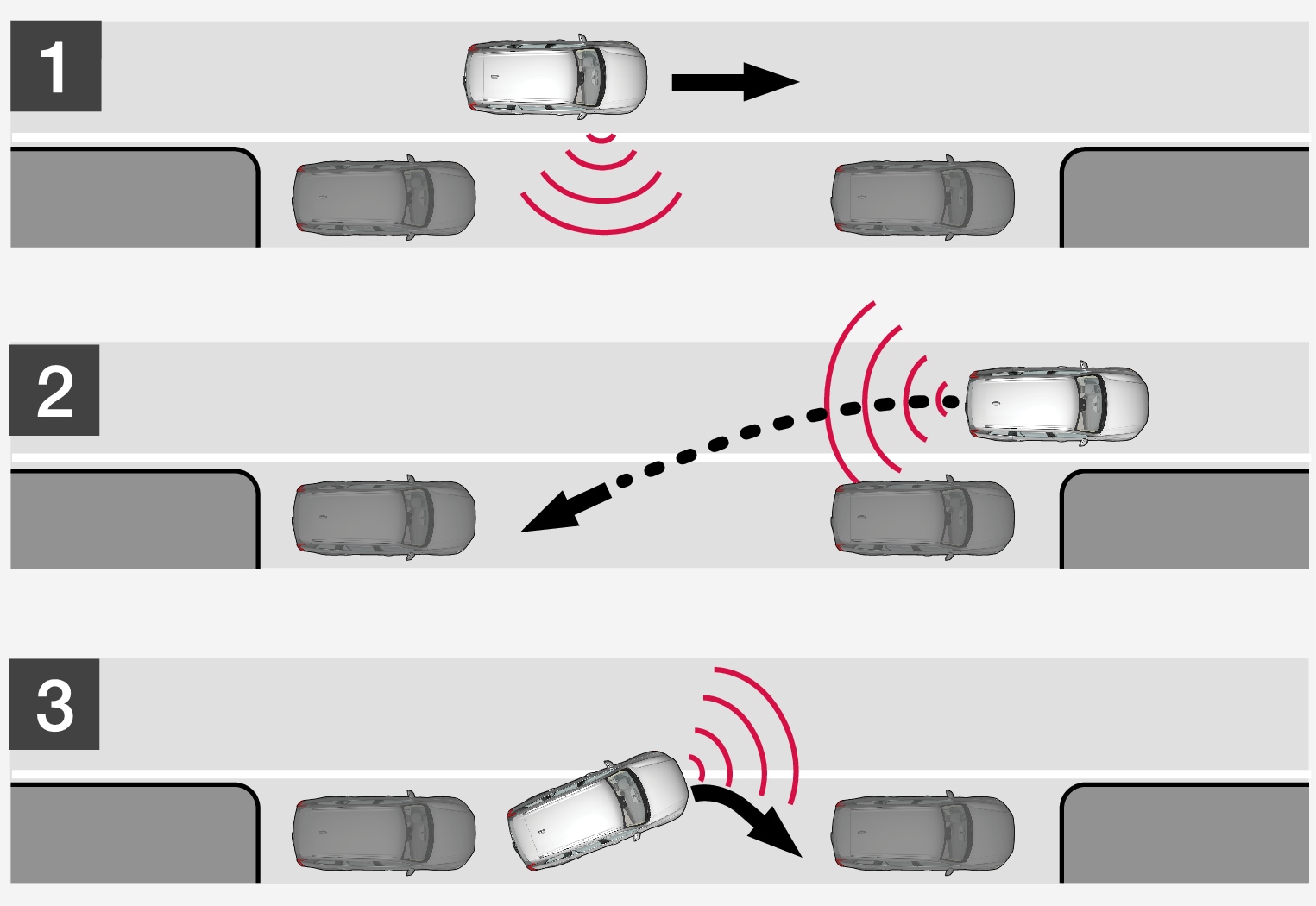
PAP 機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 後退中に、車両は駐車スペースに入るように操舵されます。
- 車両を前進/後退させて、車両を駐車スペースに入れます。
自動発車 機能を使用することにより、縦列駐車された車両は PAP による支援を利用して駐車スペースから出ることもできます。「アクティブパークアシストによる駐車」の「駐車スペースから出る」を参照してください。
並列駐車
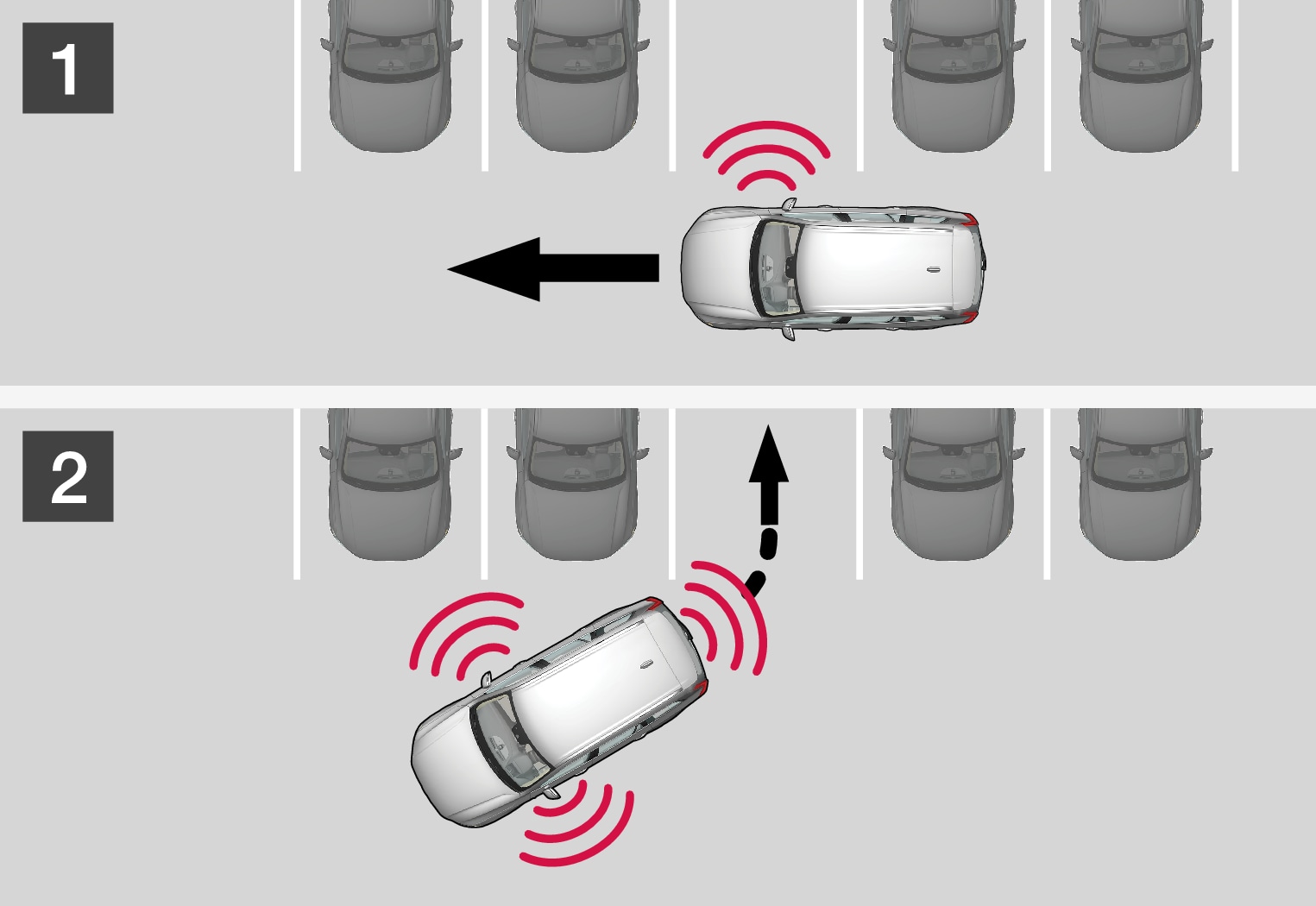
PAP 機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 車両を駐車スペースへ後退させます。その後車両を前進/後退させて、車両を駐車スペースに入れます。
ノート
並列駐車された車両に PAP 自動発車 機能を使用することはできません。本機能は縦列駐車された車両にのみ使用する必要があります。