
















アダプティブクルーズコントロールでの追従対象車両の変更
オートマチックトランスミッション車の場合、アダプティブクルーズコントロール(ACC1)には特定速度のときに追従対象車両を変更する機能があります。
追従対象車両の変更
アダプティブクルーズコントロールにより30 km/h (20 mph)未満の速度で別の車両に追従しているときに追従対象車両が走行車両から静止車両に変わると、アダプティブクルーズコントロールは減速して静止車両に対応します。
注意
アダプティブクルーズコントロールにより、約30 km/h (20 mph)を超える速度で別の車両に追従している際に、目標車両が移動中の車両から静止車両に変わった場合には、アダプティブクルーズコントロールは静止している車両を無視して、設定されている速度まで加速します。
- 運転者は注意を怠らず、必要に応じてブレーキをかけてください。
追従対象車両の変更による自動スタンバイモード
以下の場合、アダプティブクルーズコントロールが解除され、スタンバイモードになります。
- 速度が10 km/h未満で、アダプティブクルーズコントロールが、追従対象が静止車両なのか別の障害物(減速帯など)なのかを判断できない場合。
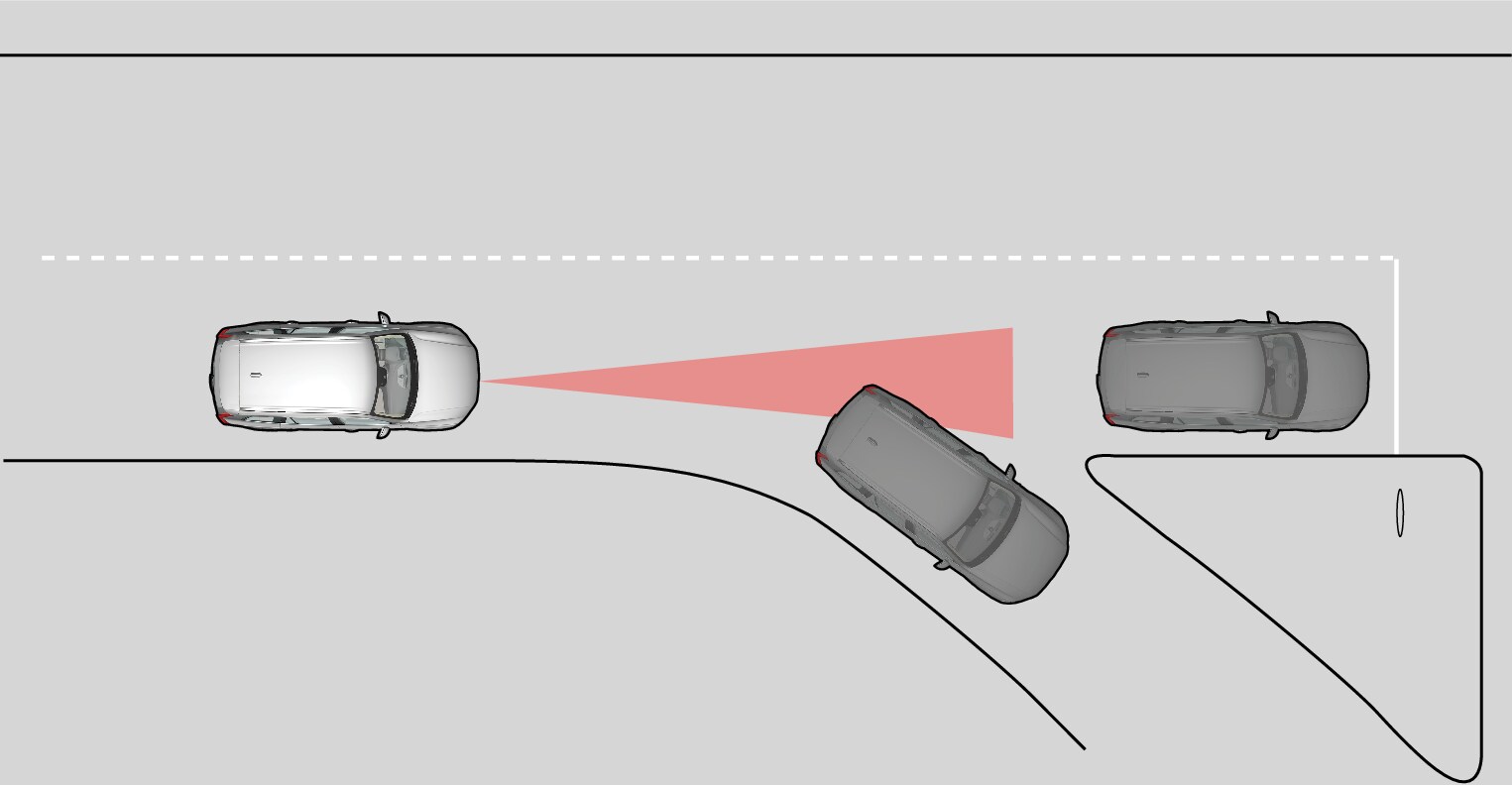
- 速度が10 km/h未満で、先行車が曲がったためアダプティブクルーズコントロールが追従する車両がなくなった場合。