
















アダプティブクルーズコントロール*1
アダプティブクルーズコントロール(ACC2)は、一定の速度を維持しながら設定されている先行車との車間時間を保って走行できるように支援します。
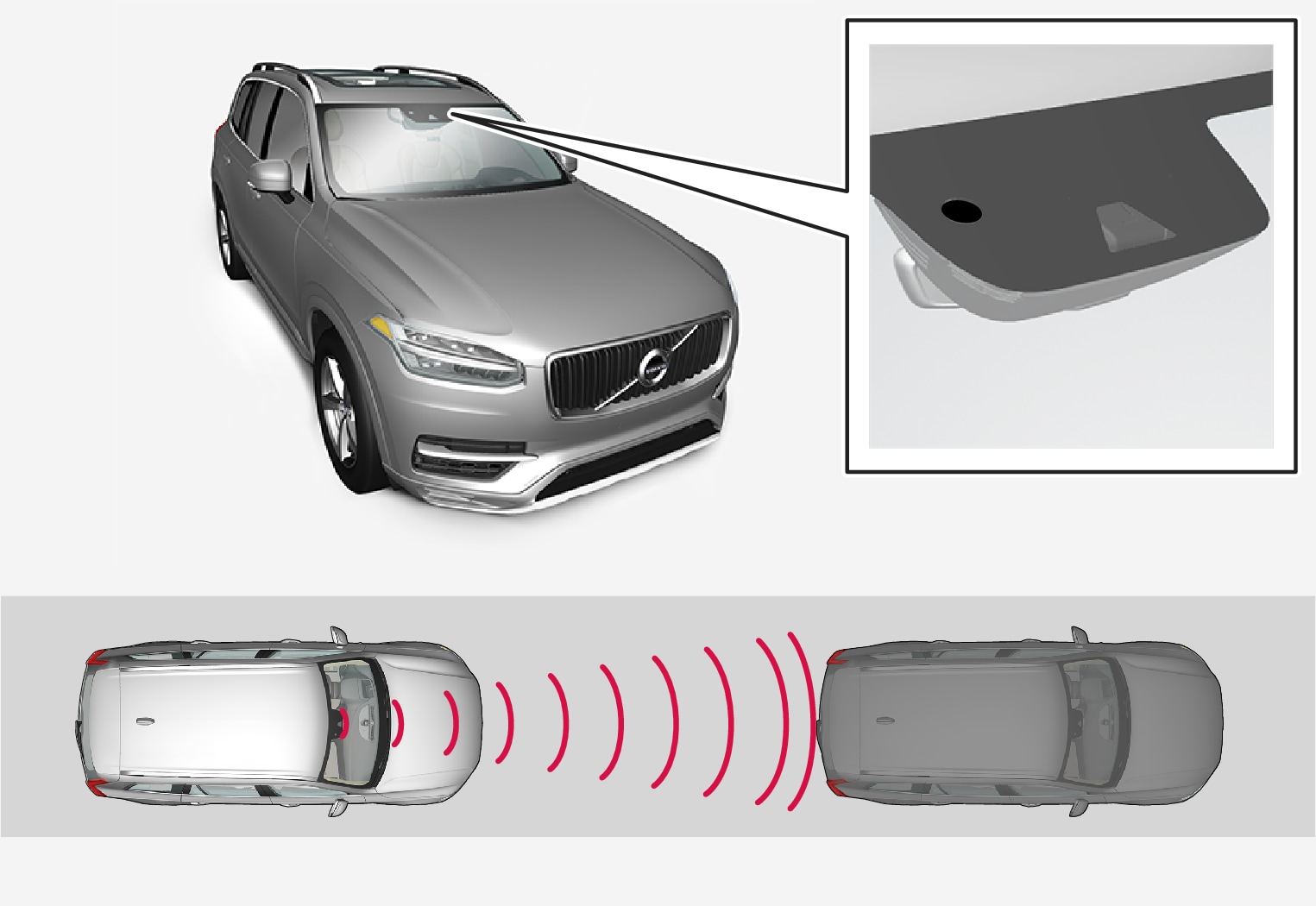
アダプティブクルーズコントロールは、交通の流れがスムーズな高速道路や長い直線の幹線道路を長時間走行する際に、よりリラックスした走行を可能にします。
運転者は目標速度と、先行車との車間時間を選択します。カメラおよびレーダーユニットが前方に自車よりも遅い車両を検知すると、先行車との車間時間設定に基づいて自動的に速度が調整されます。前方の車両がいなくなると、車両は選択されていた速度に戻ります。
コーナリングサポート*機能をオンにすると、車両の速度に影響する場合があります。
アダプティブクルーズコントロールの目的:
- 速度をスムーズに制御する。急ブレーキが必要な状況では、かならずご自分でブレーキをかけてください。速度差が大きく異なる場合や、前方の車両が急ブレーキをかけた場合などです。レーダーユニットには限界があるため、不意にブレーキがかかることや、あるいはまったくブレーキがかからないことがあります。
- 運転者が設定した車間時間を保ちながら同じ車線の先行車両に追従する。レーダーユニットが前方の車両を検知できない場合、車両は運転者の設定した速度を維持します。先行車両が加速して設定速度を超えた場合も同様です。
注意
- この機能は、運転を手助けし、安全性を向上させるための補助的な運転者サポートであり、交通条件、気象条件および道路条件によっては対応できない状況があります。
- 機能の限界やシステムの使用前に知っておくべきことを把握するために、運転者には、オーナーズマニュアルを確認して、この機能に関連する項目をすべて読むことをお薦めします。
- 運転者サポート機能は運転者の注意および判断に代わるものではありません。現行の交通規則および規制に従い、ほかの車両と適切な距離をとって、適切な速度で安全に車両を運転することは、つねに運転者の責任です。
重要
運転者サポートコンポーネントのメンテナンスは、サービス工場で実施する必要があります。ボルボ指定のサービス工場をご利用ください。