
















パークアシスト・パイロット(前方、後方および側方)
パークアシスト・パイロットは、車両のどの部分が障害物に接近しているかに応じて使用するパラメーターが異なります。
後方
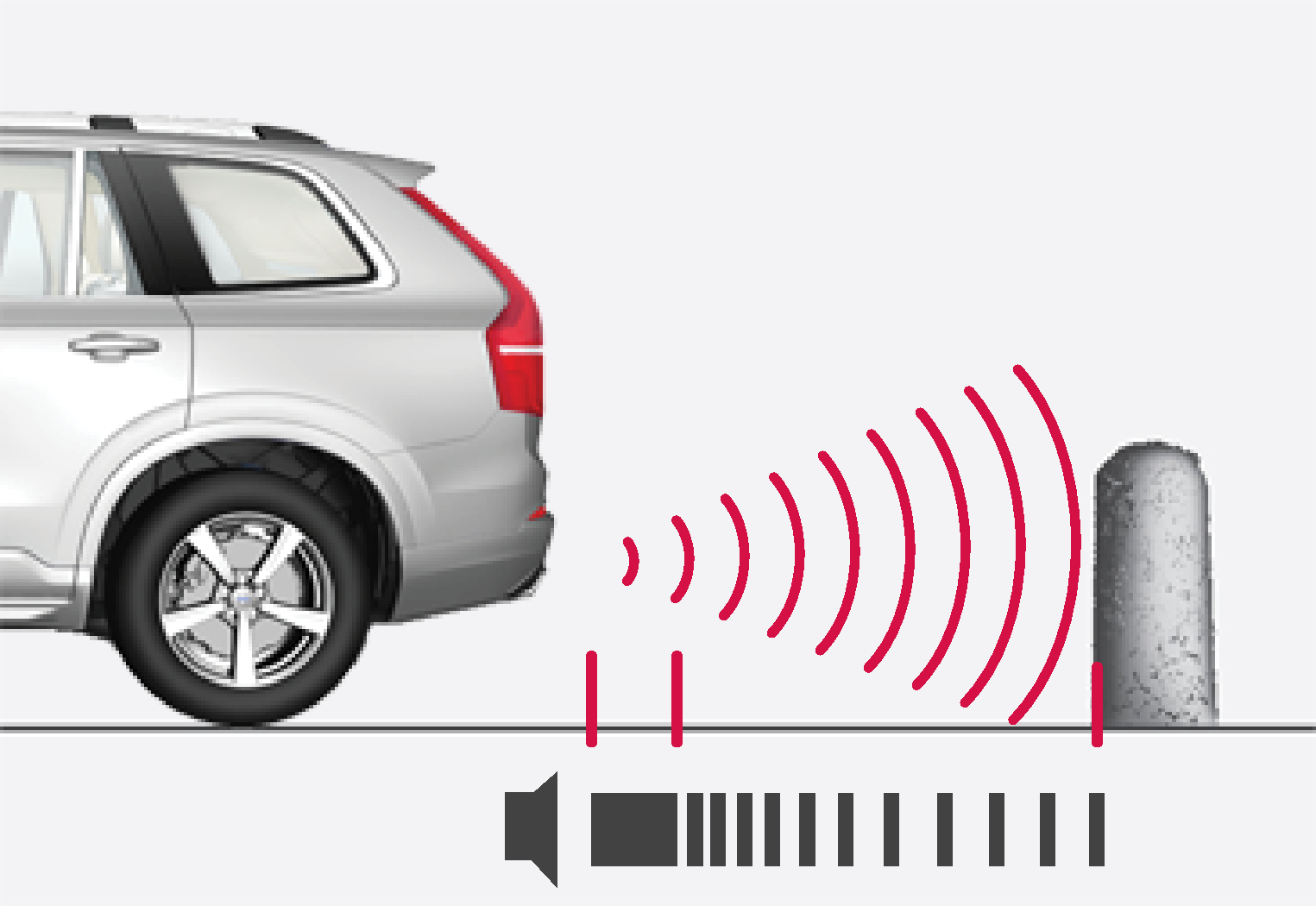
リアセンサーは、ギヤの入っていない状態で車両が後方に動き出した場合やギヤセレクターレバーをリバース位置にしたときに作動します。
測定範囲は車両後方約1.5 m (5 ft)です。
トレーラーを連結した状態で後退する場合、リアパークアシストは自動的に解除されます。
ノート
ボルボ純正トレーラーケーブルを使用せずに、トウバーにトレーラーまたはバイクキャリアーを取り付けて後退する際には、センサーがトレーラーやバイクキャリアーに反応しないように、パークアシストを手動で解除することが必要になる場合があります。
側方
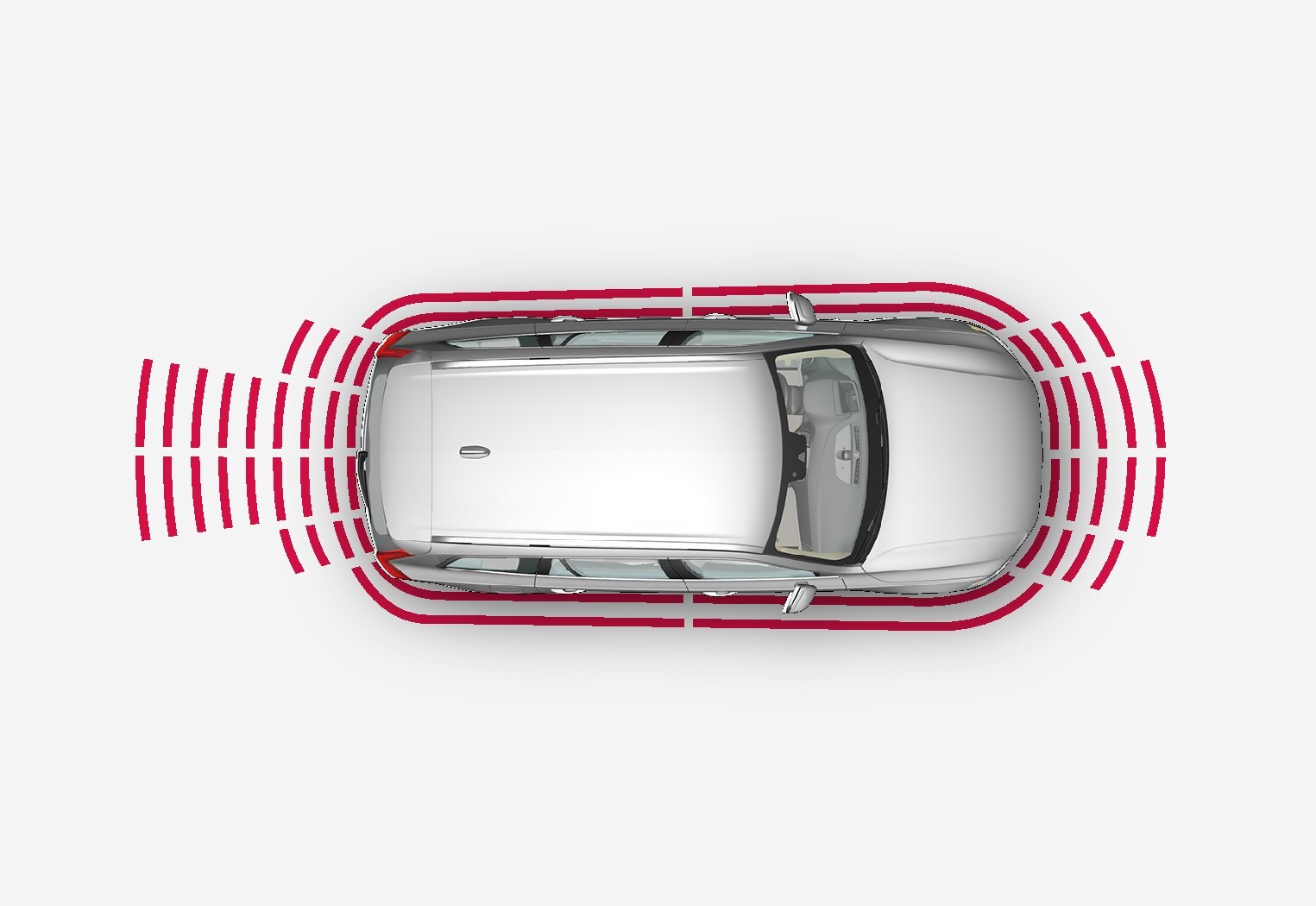
パークアシストサイドセンサーは、エンジン始動時に自動的に起動します。センサーは速度が10 km/h未満(6 mph未満)のときに作動します。
距離の測定は、両サイドから約30 cm (1 ft)の距離で開始します。両サイドにある障害物を知らせる警告音は、サイドスピーカーから聞こえます。
前方
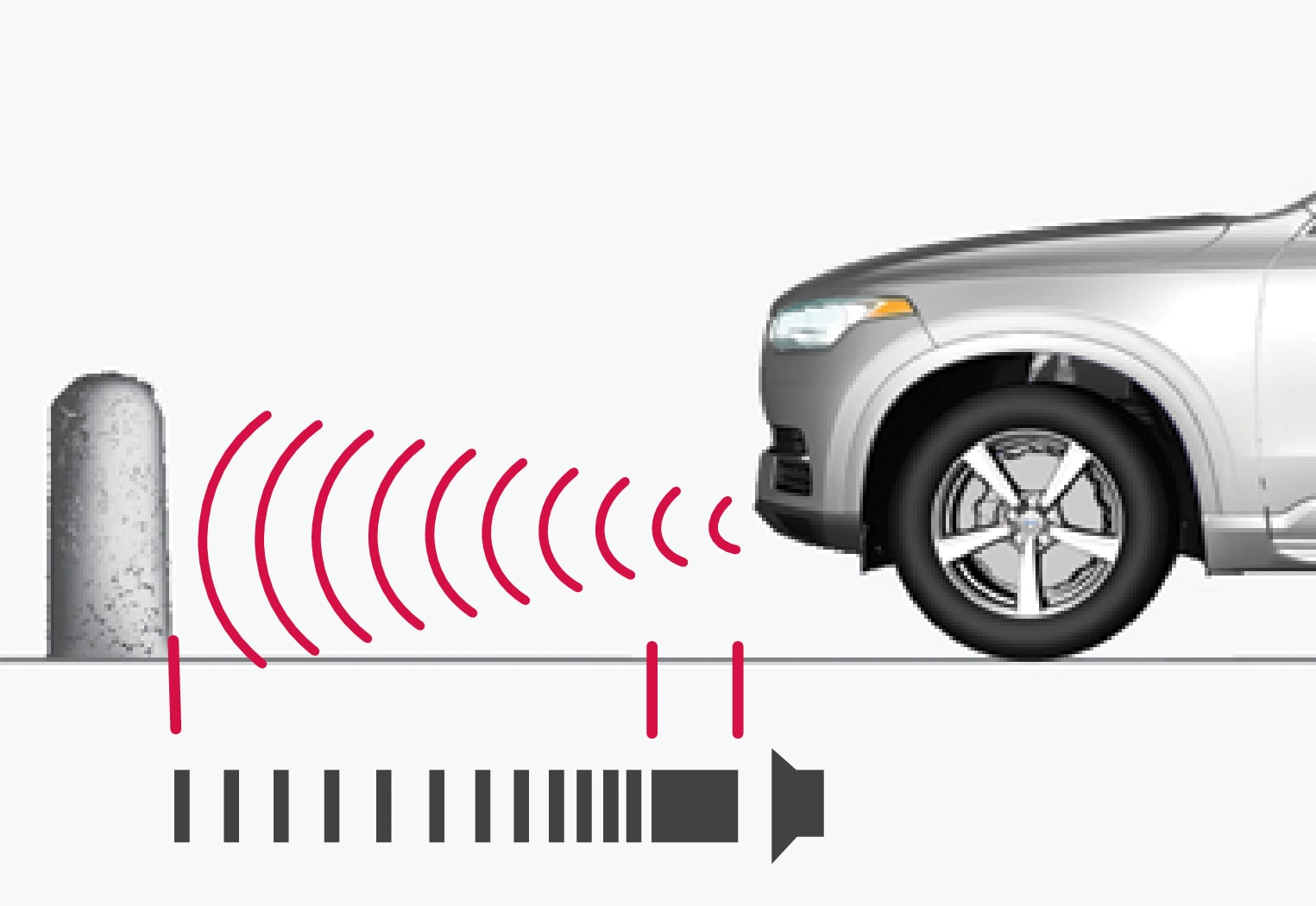
フロントパークアシストセンサーは、エンジン始動時に自動的に起動します。フロントセンサーは速度が10 km/h未満(6 mph未満)のときに作動します。
測定範囲は車両前方約80 cm (2.5 ft)です。
ノート
パーキングブレーキを作動した場合、またはオートマチックトランスミッション車両でPモードを選択した場合は、パークアシストが非作動状態になります。
重要
補助ライトなど装着時:センサーの邪魔にならないように注意してください。補助ライトを障害物として検知して、誤作動する場合があります。