Parkování s aktivní parkovací asistencí*
Aktivní parkovací asistence (PAP1) pomáhá řidiči zaparkovat ve třech krocích. Tato funkce může rovněž pomoci řidiči vyjet z parkovacího místa.
Tato funkce měří prostor a řídí vozidlo - řidič má za úkol:
- sledovat, co se děje kolem vozidla
- postupovat podle pokynů na středovém displeji
- řadit (dopředu/dozadu) - "zvukové upozornění" informuje řidiče, že by měl přeřadit
- regulovat a udržovat bezpečnou rychlost
- brzdit a stát.
Po provedení jednotlivých kroků se na obrazovce středového displeje zobrazují symboly, grafiky a/nebo text.
Funkci lze aktivovat po nastartování motoru, jakmile jsou splněna následující kritéria:
- K vozidlu není připojen přívěs
- Rychlost vozidla je nižší než 30 km/h (20 mph).
Poznámka
Když funkce hledá místo k zaparkování, vzdálenost mezi vozidlem a místem k zaparkování by měla být 0,5-1,5 m (1,6-5,0 stop).
Parkování
Funkce zaparkuje vozidlo následovně:
- Vyhledá se a změří místo k zaparkování.
- Během couvání je vozidlo řízeno na místo.
- Vozidlo je ustaveno na místo - systém může potom vyžadovat, aby řidič přeřadil a brzdil.
Vyhledání a změření míst k zaparkování

Funkci lze aktivovat v zobrazení funkcí na středovém displeji.
Je přístupna rovněž ze zobrazení kamery.
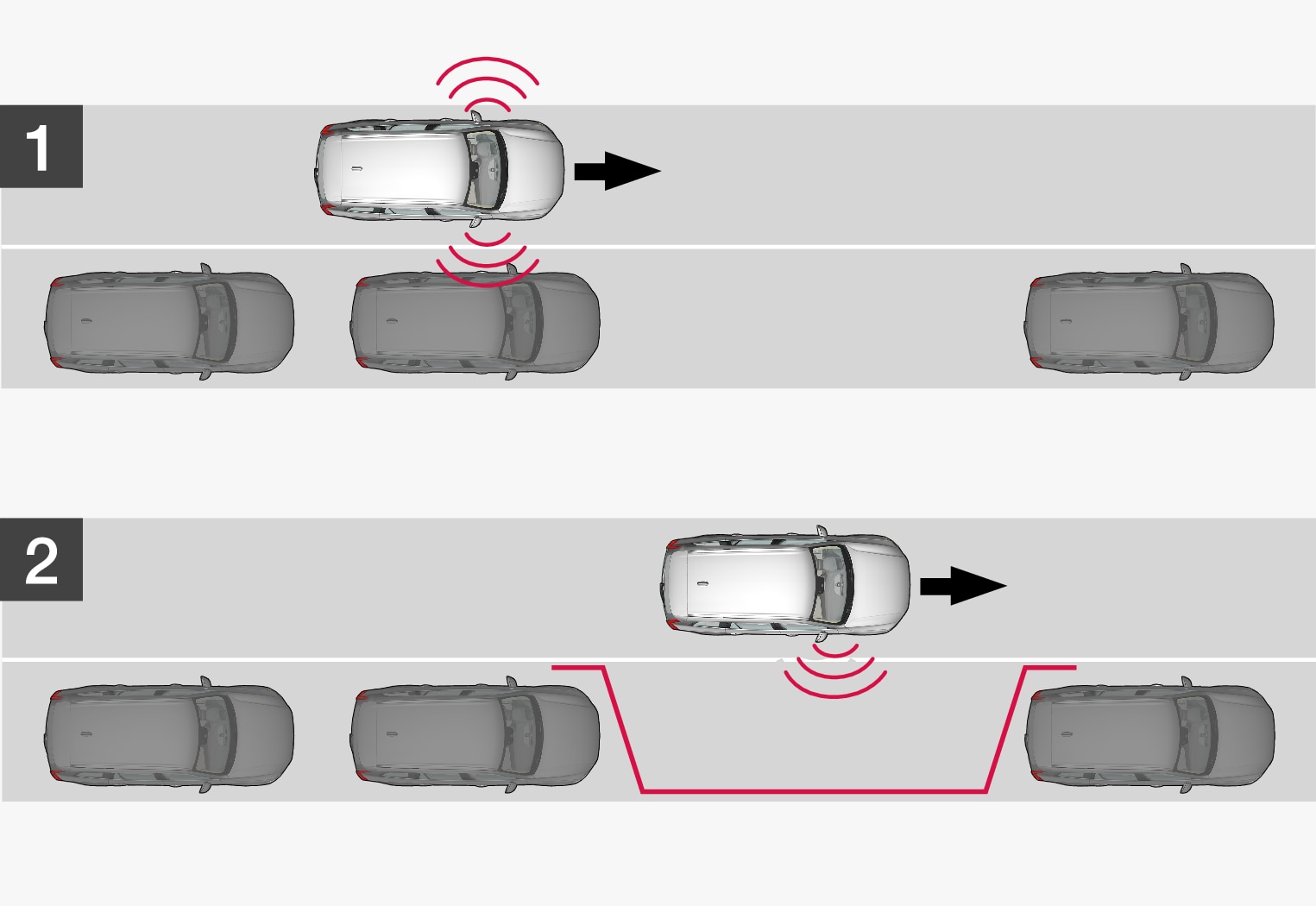

Při parkování nejezděte rychleji než 30 km/h (20 mph).
Klepněte na tlačítko Zaparkovat v zobrazení funkcí nebo v zobrazení kamery.
Funkce PAP vyhledá místo k zaparkování a zkontroluje, zda je toto místo dostatečně velké.
Buďte připraveni zastavit vozidlo, jakmile vás grafika a zpráva na středovém displeji informuje, že bylo nalezeno vhodné místo k zaparkování.
Zobrazí se vyskakovací okno.
Zvolte Parkování za sebou nebo Kolmé parkování a zařaďte zpětný chod.
Poznámka
Funkce vyhledá místo k zaparkování, zobrazí pokyny a navede vozidlo na straně spolujezdce na dané místo. V případě potřeby lze však vozidlo zaparkovat na ulici také na straně řidiče:
- Aktivujte směrové světlo na straně řidiče - systém vyhledá místo k zaparkování na této straně vozidla.
Couvání na parkovací místo
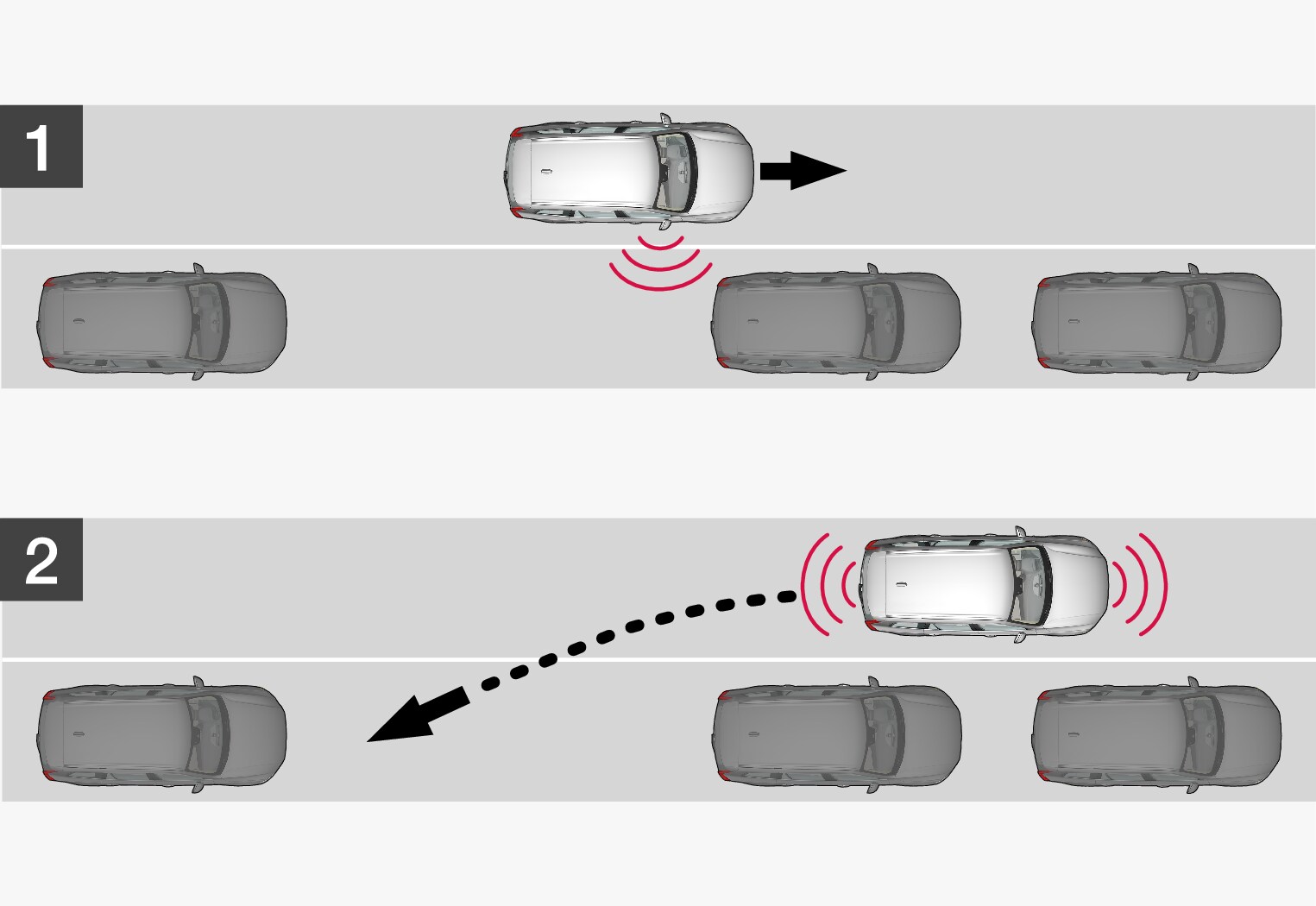
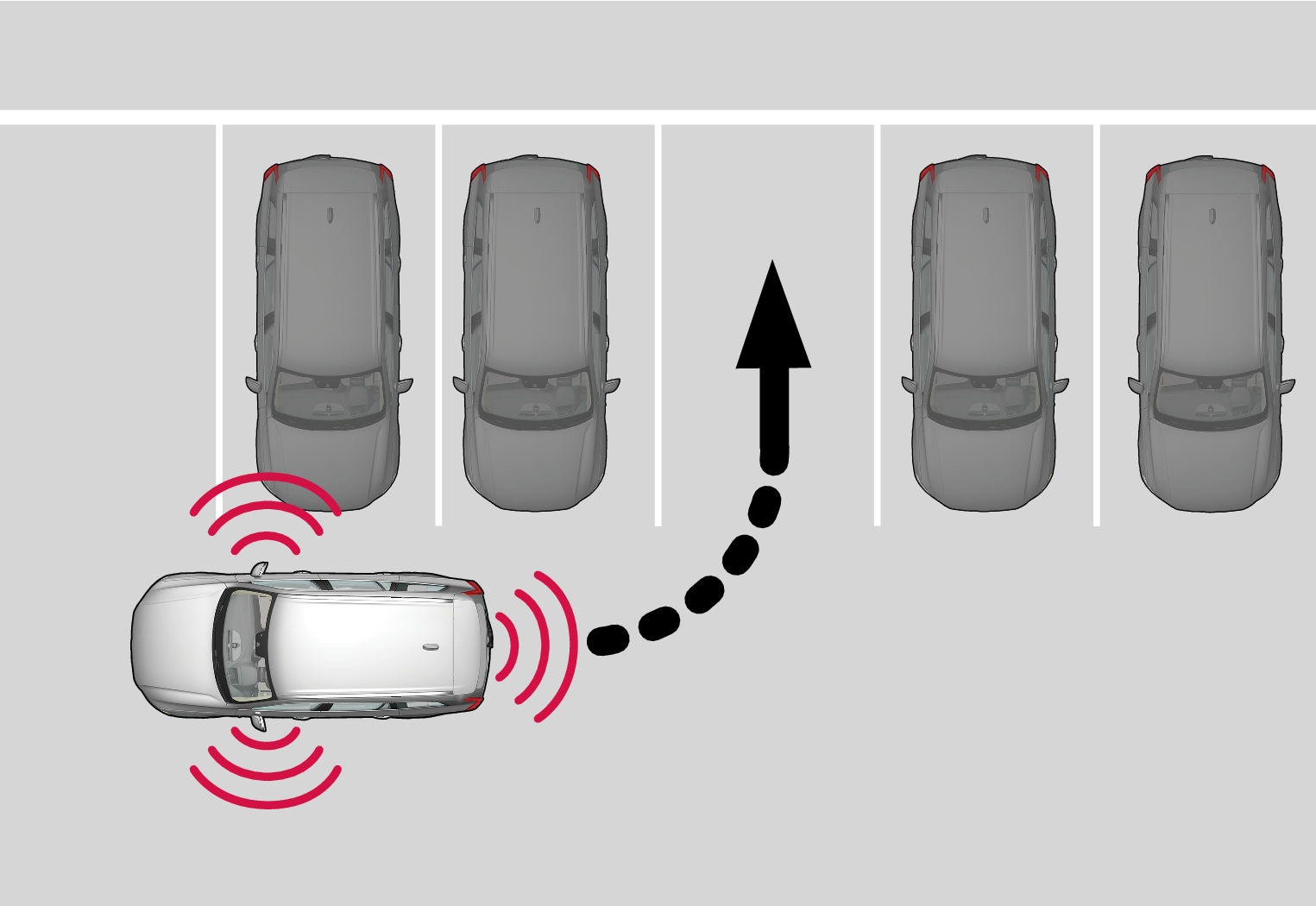
Při couvání s vozidlem na parkovišti postupujte následovně:
Zkontrolujte, zda prostor za vozem je prázdný, a zařaďte zpětný chod.
Pomalu a opatrně couvejte. Přitom se nedotýkejte volantu. Nesmíte jet rychleji než 7 km/h (4 mph).
Buďte připraveni zastavit vozidlo, pokud vás k tomu vyzve grafika nebo zpráva na středovém displeji.
Poznámka
- Je-li funkce aktivována, pusťte volant.
- Volantu nic nesmí bránit v nerušeném otáčení.
- Aby byl výsledek optimální, počkejte, než se volant dotočí, a potom se rozjeďte dozadu/dopředu.
Zajetí s vozidlem na parkovací místo
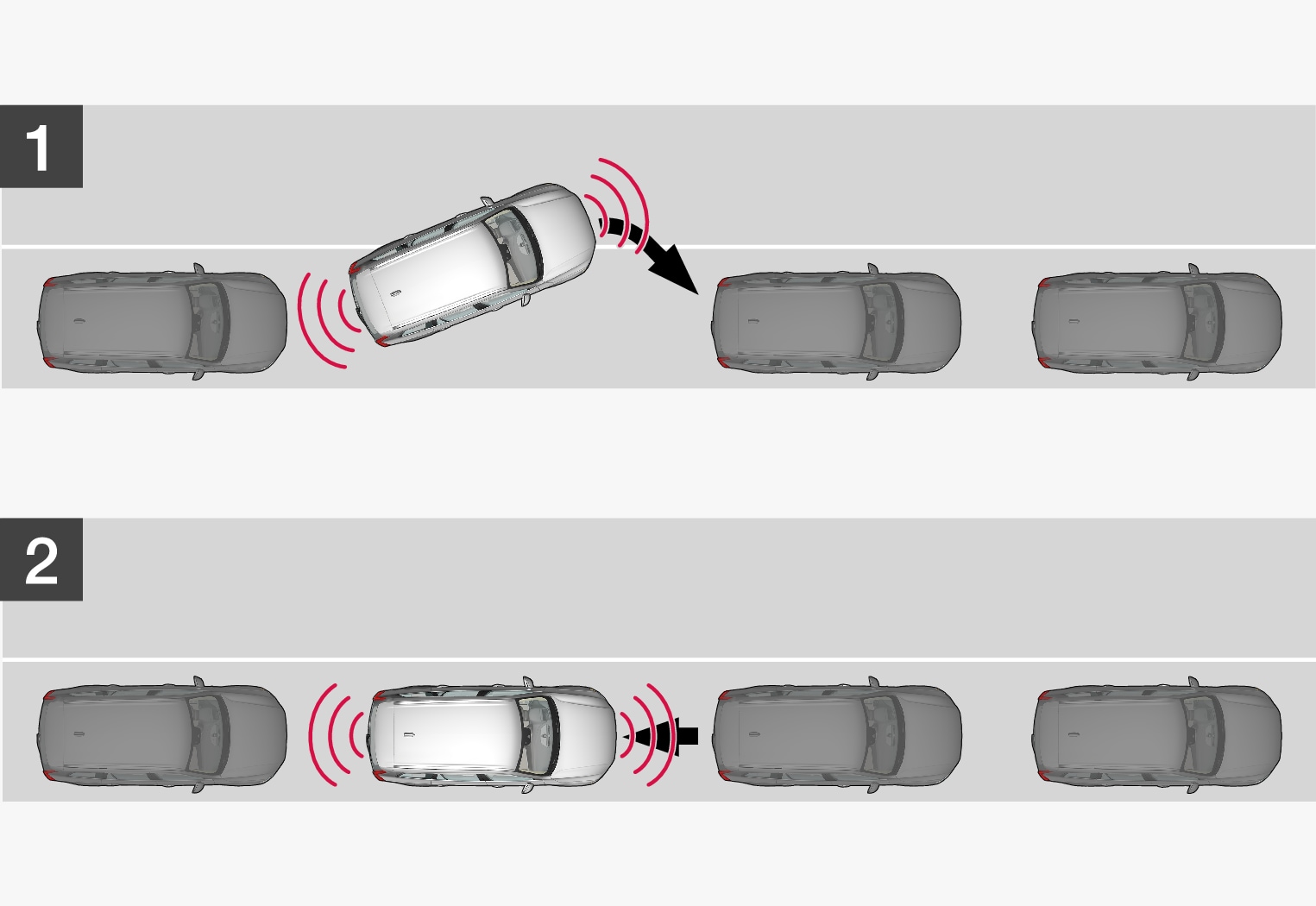
Postupujte následovně:
Volicí páku přesuňte do polohy řazení dle pokynu systému. Počkejte, až se volant otočí a pomalu jeďte dopředu.
Buďte připraveni zastavit vozidlo, pokud vás k tomu vyzve grafika nebo zpráva na středovém displeji.
Zařaďte zpětný chod a pomalu jeďte dozadu.
Buďte připraveni zabrzdit vozidlo, pokud vás k tomu vyzve grafika nebo zpráva na středovém displeji.
Tato funkce se automaticky deaktivuje. Grafika a zpráva potvrdí, že parkování bylo ukončeno. Možná bude nutné, aby řidič provedl úpravu. To, zda je vozidlo správně zaparkováno, dokáže určit pouze řidič.
Důležité
Pokud senzory používá aktivní parkovací asistence (PAP2), výstražná vzdálenost je kratší než v případě, kdy senzory používá parkovací asistent.