使用主动式泊车辅助*系统停车
主动式驻车辅助系统(Park Assist Pilot - PAP)帮助驾驶员分三步停车。该功能还可以帮助驾驶员将车开出停车位。
注意
PAP功能可测量停车位并操纵车辆 - 驾驶员的任务是:
- 持续密切观察车辆周围情况
- 遵守中央显示屏的提示
- 换档(倒档/前进档)
- 控制和保持安全车速
- 制动和停车。
发动机起动后,如果满足如下条件,则PAP启用:
- 汽车未拖挂拖车。
- 车速必须低于30公里/小时(20 英里/小时)。
注意
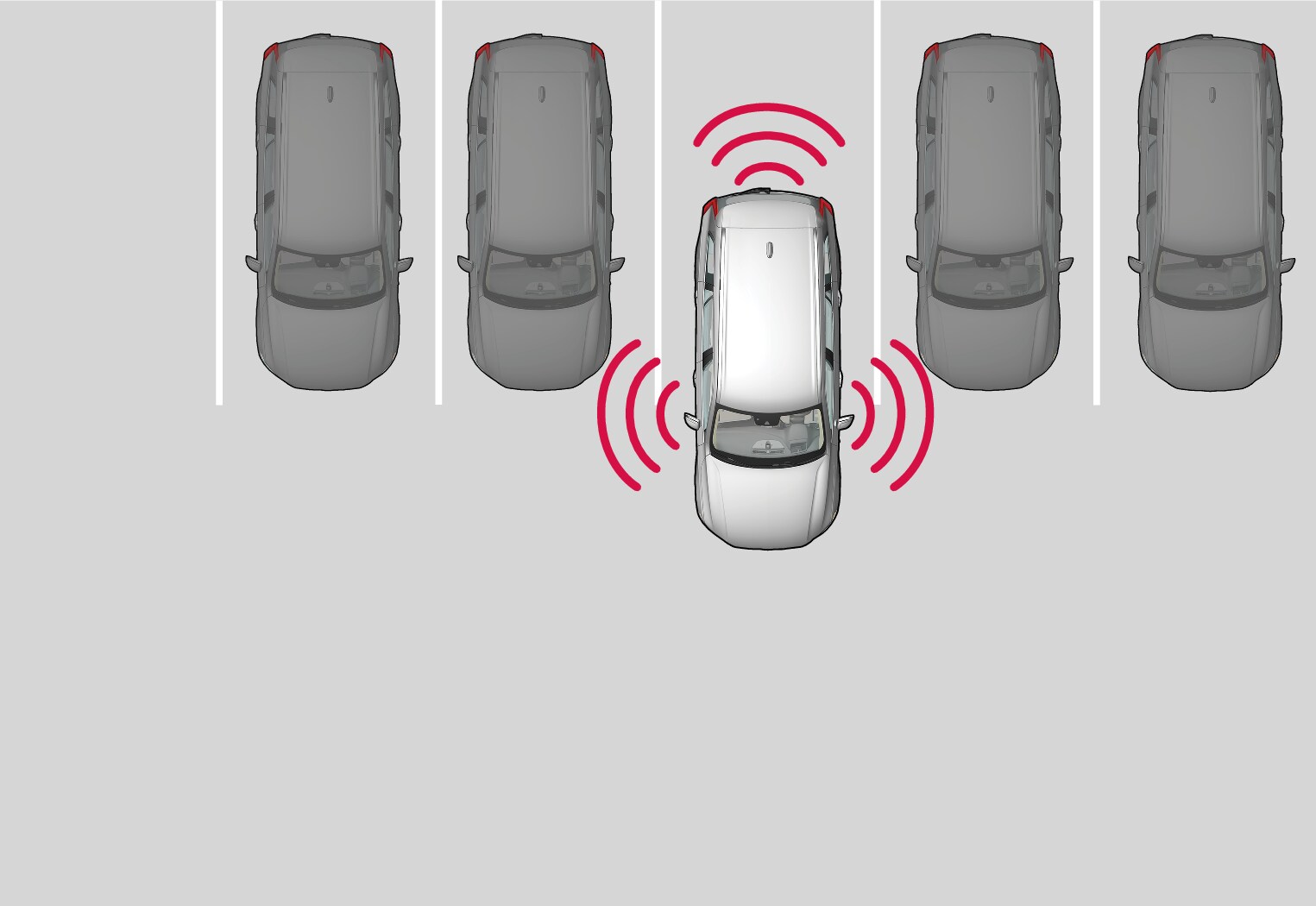
当PAP正在搜索停车位时,车辆与停车位之间的距离应为0.5-1.5米。
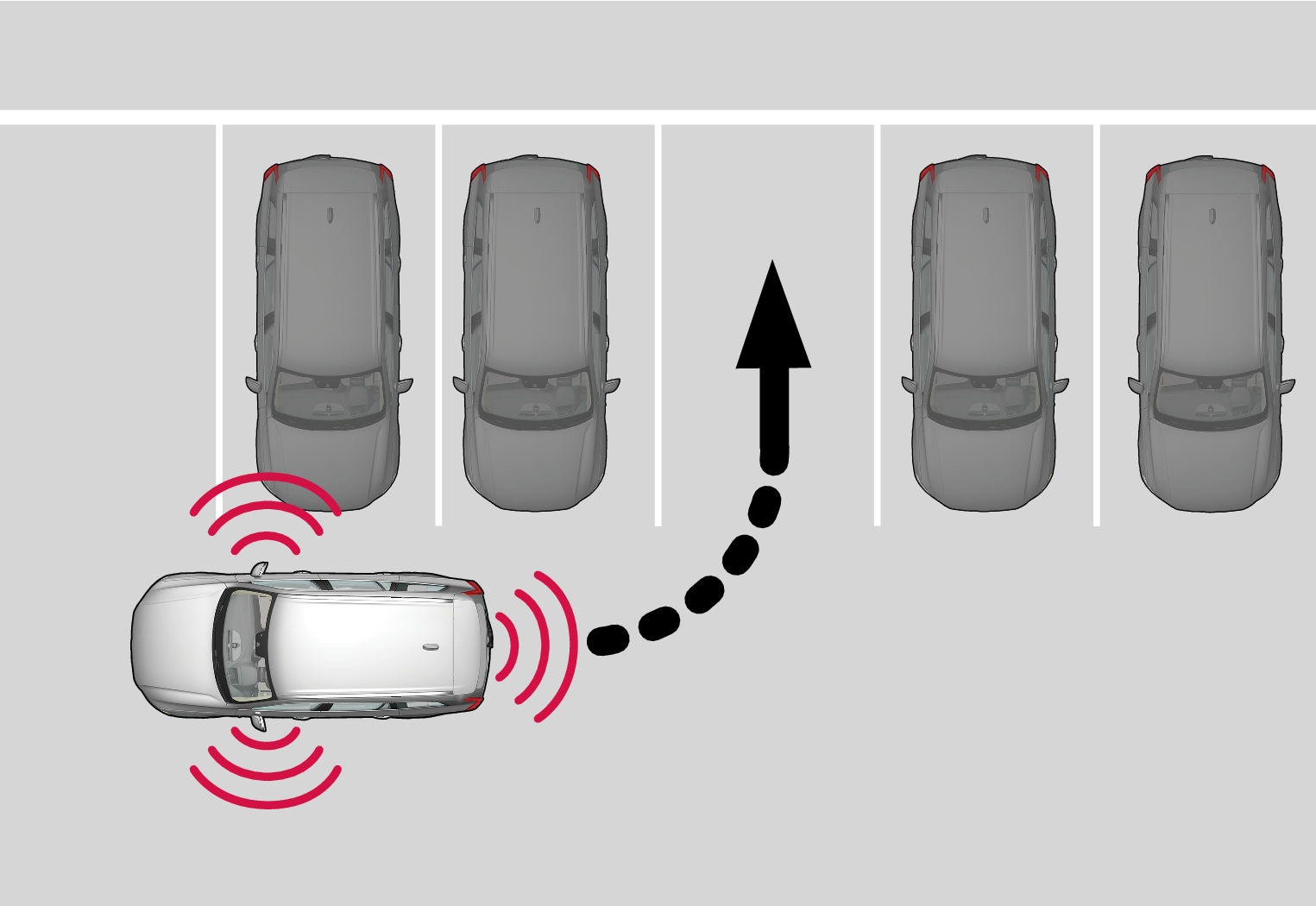
泊车
PAP功能按如下步骤驻车:
- 停车位已被识别并测量。
- 汽车倒入停车位。
- 车辆停入停车位 - 系统可能请求驾驶员换档。
寻找和测量停车位

该功能可在中央显示屏的功能视图中启用。
还可从摄像头视图访问。
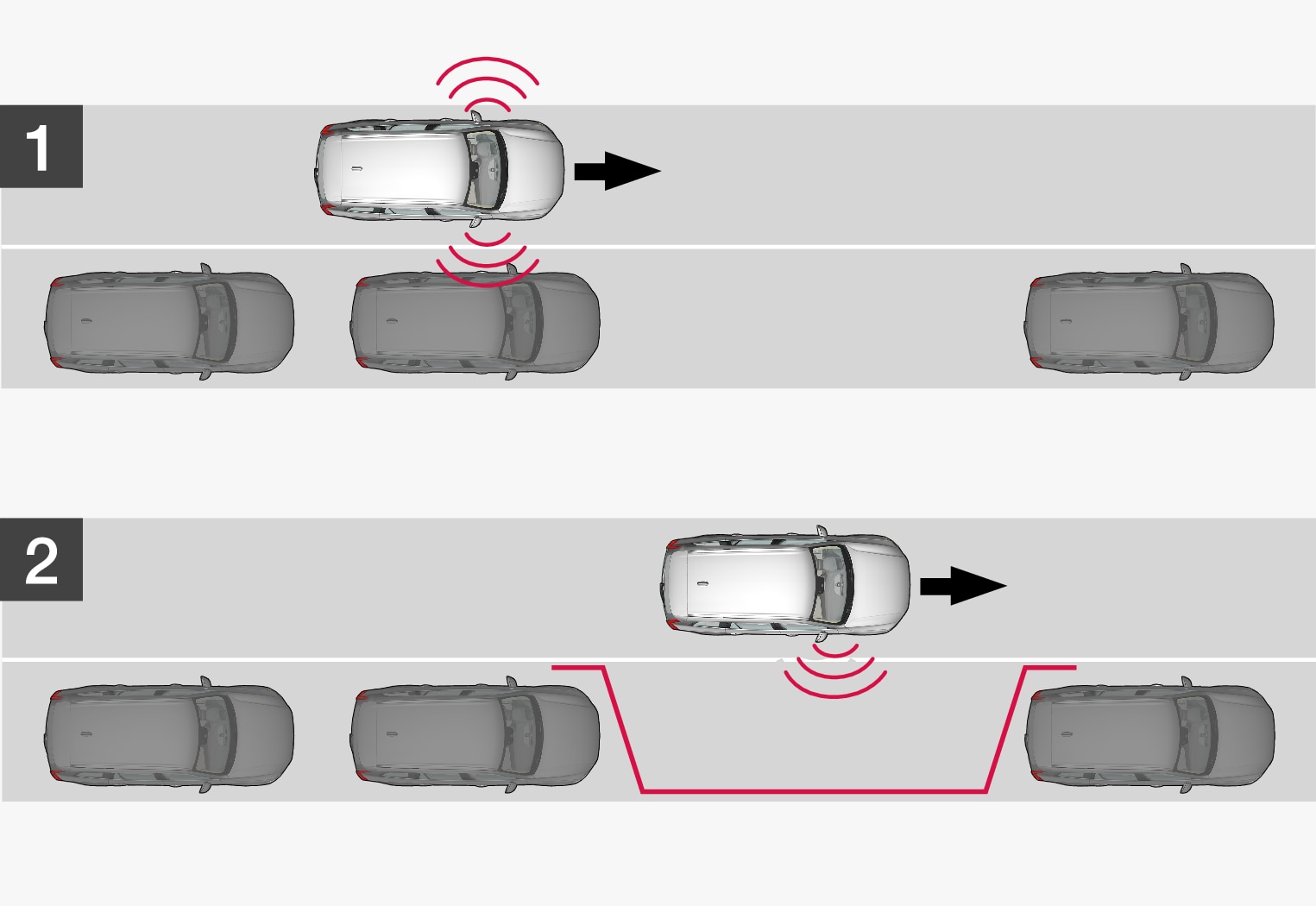

平行泊车时,车速不得超过30公里/小时(20英里/小时);垂直泊车时,不得超过20公里/小时(12英里/小时)。
在功能视图中点击泊入按钮。
PAP寻找停车位,并检查该停车位是否足够宽敞。
留意中央显示屏 — 准备好在图形和消息显示已找到合适的车位时停车。
显示一个弹出窗口。
选择 平行驻车 或 垂直驻车 并挂入倒档。
注意
PAP搜索停车区域,显示说明并引导汽车停驻在乘客侧的路面上。如有必要,汽车也可停驻在驾驶员侧的街道上:
- 启用驾驶员侧的方向灯 - 此后系统搜索车辆该侧的停车位。
倒入停车位
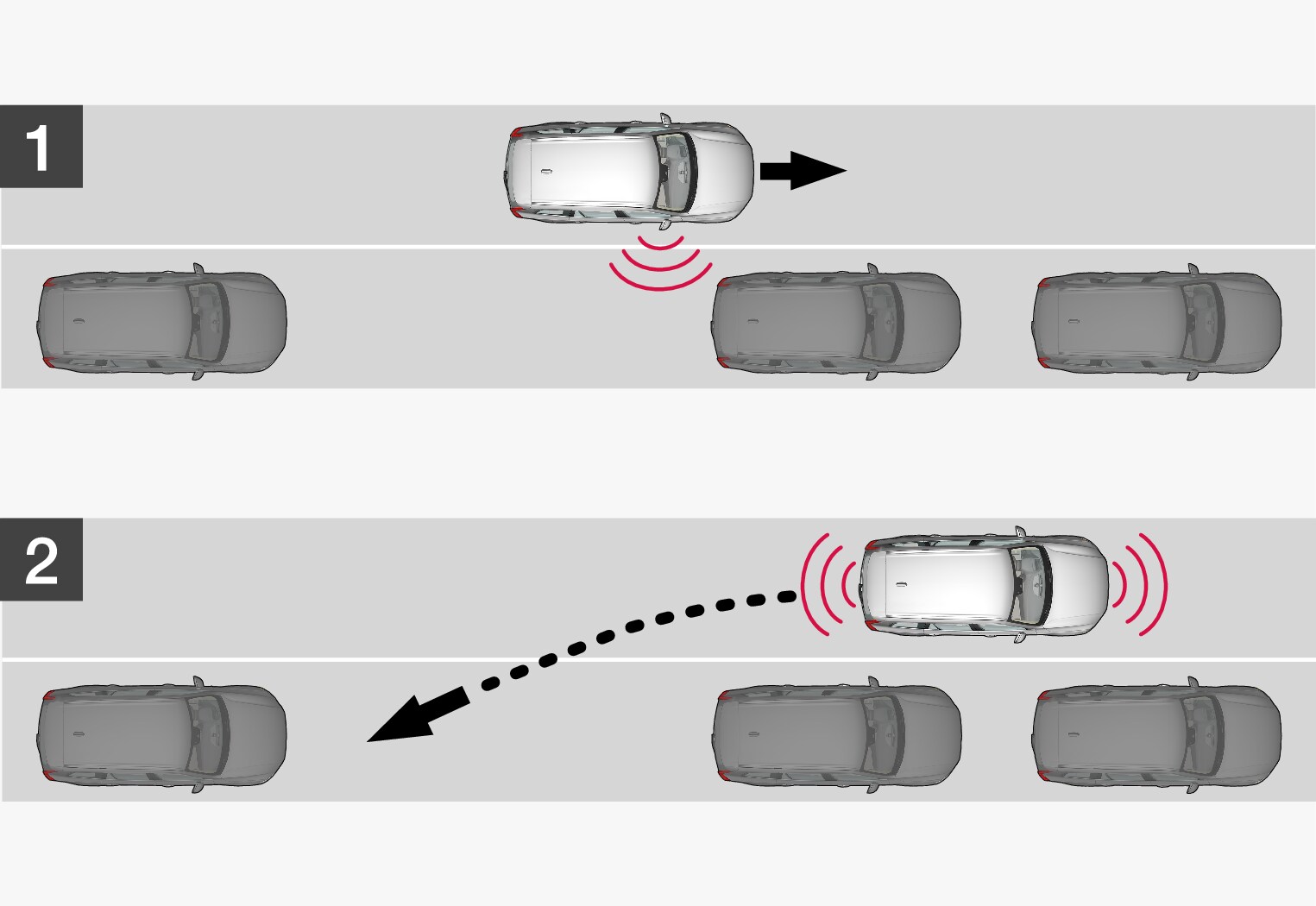
检查车后是否有物体。
不触碰方向盘,缓慢小心地倒车 - 且不要超过7 km/h (4 mph)。
PAP 随后操控方向盘,将车开进停车位。
留意中央显示屏,准备好在图形和消息要求停车时停车。
注意
- PAP功能启用时将双手从方向盘上移开。
- 确保方向盘未受阻碍,可以自由转动。
- 对于最佳的结果 - 开始向后/向前行驶前,请等待直到方向盘已经转动完毕。
将车开进停车位
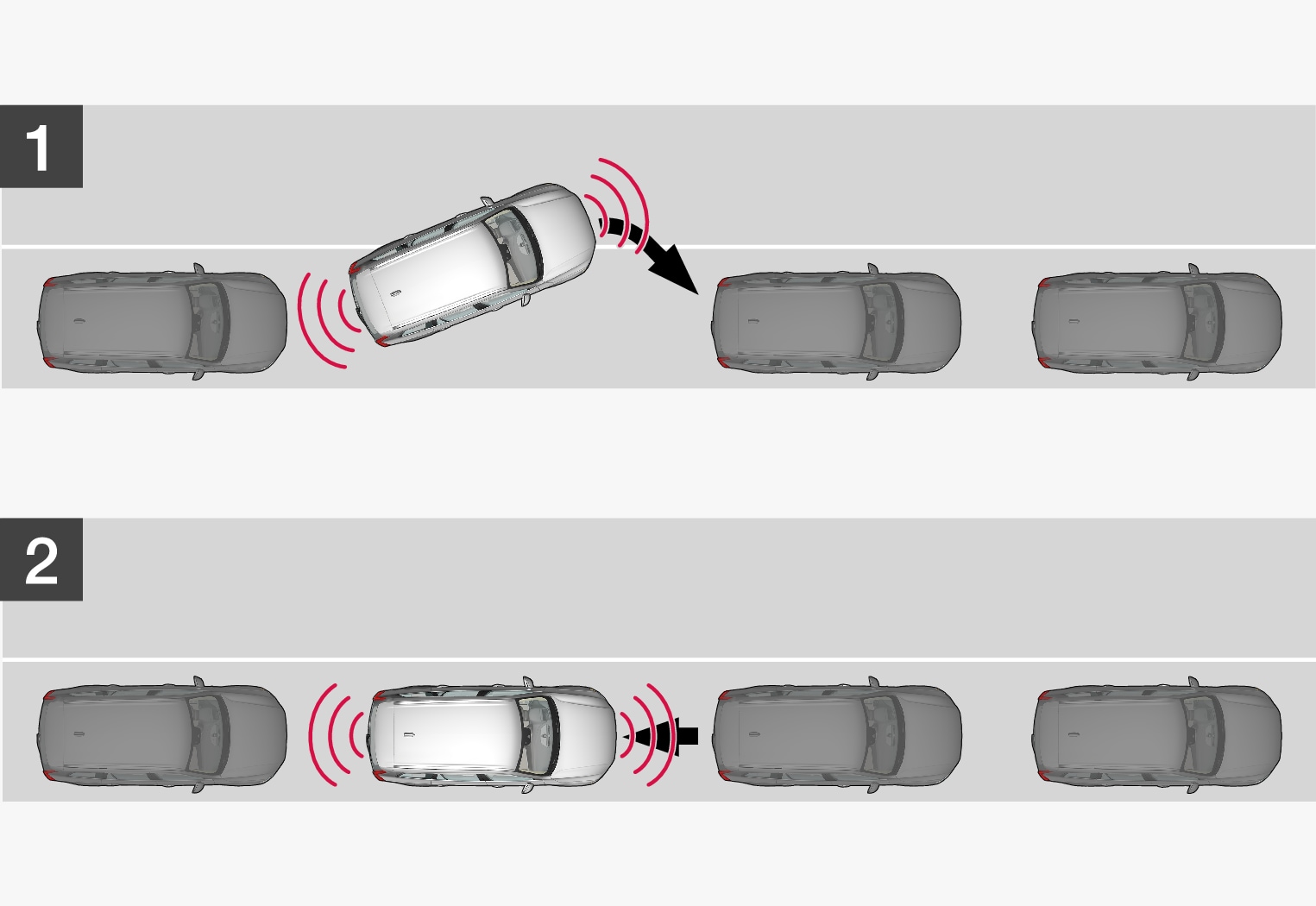
将选档杆挂入 D 档,等待方向盘转动,汽车慢速向前
留意中央显示屏,准备好在图形和消息要求停车时停车。
挂入倒档并慢速向后行驶。
留意中央显示屏,准备好在图形和消息要求停车时停车。
该功能自动停用,图形和消息显示停车完成。可能需要驾驶员纠正车辆位置。只有驾驶员才能确定车辆是否适当停放。
重要信息
PAP使用传感器时的报警距离较驻车辅助系统使用传感器时的报警距离更短。
驶离停车位
注意
驶离停车位时,泊出功能只能用于平行停驻的车辆,不适用于垂直停驻的车辆。

泊出功能在中央显示屏的功能视图中启用。
在功能视图中点击泊出按钮。
使用方向指示灯选择车辆驶离停车位的方向。
留意中央显示屏。和停车时一样,遵照指示操作。
注意,当操作完成后,方向盘会“弹回” - 此时,驾驶员可能需要回转方向盘达到最大转向角,以驶离停车位。
如果 PAP 认为驾驶员可以驶离停车位而无需任何额外操控,该功能将停止,即使驾驶员可能认为汽车仍处于停车位。