Zmiana celu dla układu aktywnej kontroli prędkości jazdy
W połączeniu z automatyczną skrzynią biegów układ aktywnej kontroli prędkości jazdy ACC1 może realizować funkcję zmiany celu przy pewnych prędkościach.
Zmiana celu
Jeżeli układ aktywnej kontroli prędkości jazdy podąża za innym pojazdem z prędkością poniżej 30 km/h (20 mph) i zmieni cel z pojazdu jadącego na nieruchomy, to układ zmniejszy prędkość, dostosowując się do pojazdu stojącego w miejscu.
Ostrzeżenie
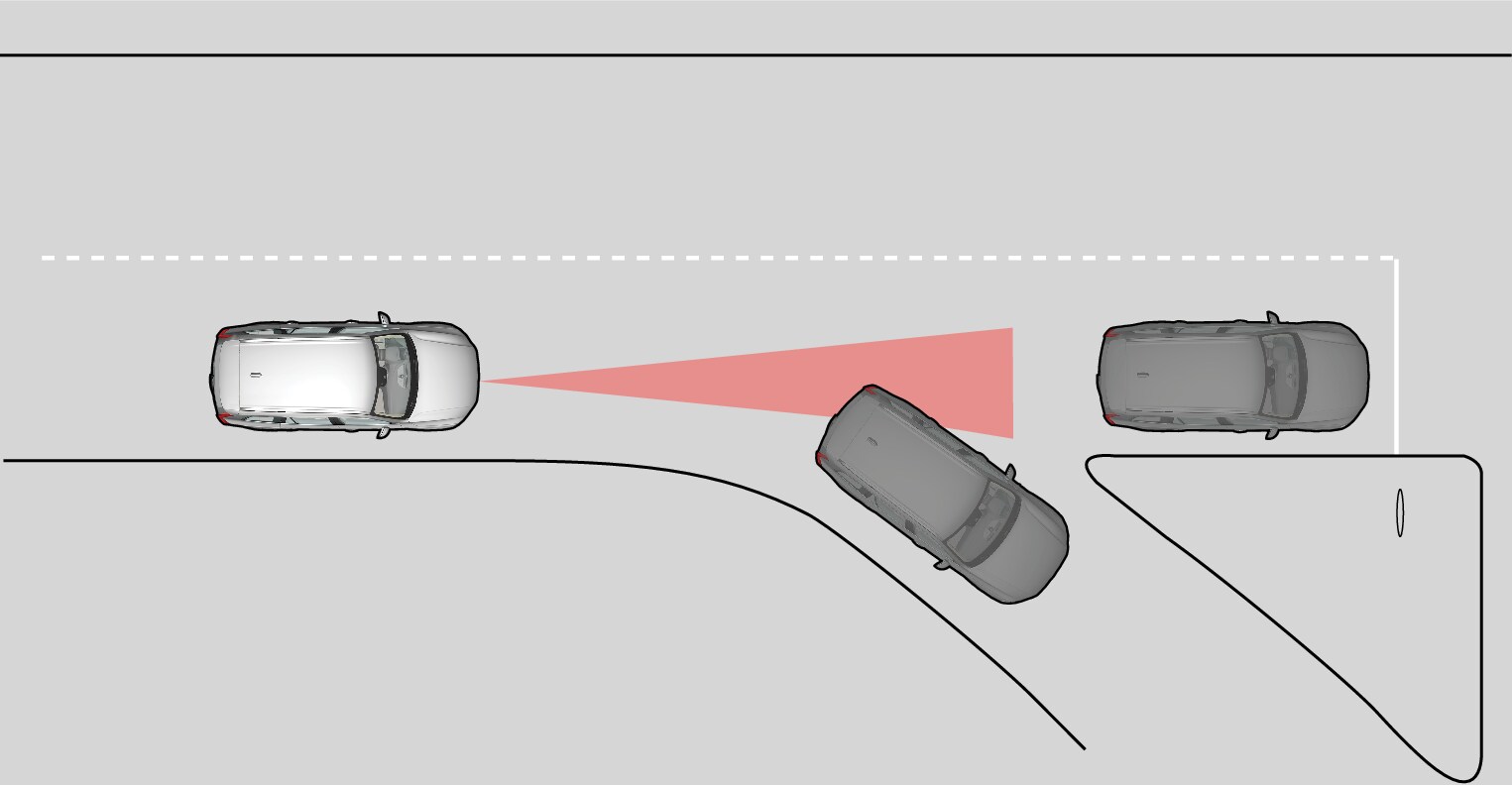
Gdy funkcja aktywnej kontroli prędkości jazdy nadzoruje podążanie za innym pojazdem przy prędkości powyżej około 30 km/h (20 mph) i nastąpi zmiana celu z pojazdu ruchomego na pojazd nieruchomy, wtedy funkcja ta zignoruje pojazd nieruchomy i zamiast tego przyspieszy do prędkości zapisanej w pamięci.
- Kierowca musi wówczas interweniować sam i rozpocząć hamowanie.
Automatyczny stan gotowości ze zmianą celu
Funkcja aktywnej kontroli prędkości zostaje wyłączona i przełączona w tryb gotowości:
- gdy prędkość jest mniejsza niż 5 km/h (3 mph) i układ aktywnej kontroli prędkości nie wie, czy obiekt będący celem to nieruchomy pojazd, czy inny obiekt, np. garb ograniczający prędkość.
- gdy prędkość jest mniejsza niż 5 km/h (3 mph) i poprzedzający pojazd skręca, w wyniku czego układ aktywnej kontroli prędkości jazdy nie ma żadnego pojazdu, za którym mógłby podążać.